2024年12月25日
ステッピングモーターの励磁方式によるトルク特性の違い
ステッピングモーターの励磁方式には、主に2つの方式があります:1相励磁と2相励磁です。これらの方式によってステッピングモーターのトルク特性に違いが生じます。
1相励磁と2相励磁によるトルク特性の違い:
1. 1相励磁:
- 1相励磁方式では、ステッピングモーターの各相を1つずつ交互に励磁します。この方式は単純で回路が簡単なため、低コストで実装できます。しかし、1相励磁ではステッピングモーターのトルク特性が低く、低速域でのトルクが不足する傾向があります。

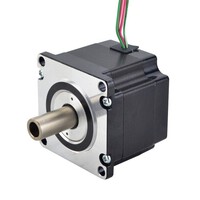
「写真の由来:デュアルシャフト Nema 24 ステッピングモーター 4.2A 4Nm (566 oz.in) 60x60x100mm 4 ワイヤー」
2. 2相励磁:
- 2相励磁方式では、ステッピングモーターの各相を2つずつ同時に励磁します。この方式は1相励磁よりもトルク特性が向上し、特に低速域でのトルクが増加します。2相励磁は1相励磁よりも高いトルク密度を実現できるため、高トルクが必要なアプリケーションに適しています。
その他の励磁方式:
- ハーフステップ励磁:
- ハーフステップ励磁は、1相励磁と2相励磁の中間的な方式であり、ステップ角を半分にすることで解像度を高めつつ、トルク特性を改善することができます。

「写真の由来:Nema 16 バイポーラステッピングモーター 1.8°18Ncm (25.5oz.in) 0.65A 4.55V 39x39x34mm 4 ワイヤー」
- マイクロステップ励磁:
- マイクロステップ励磁は、ステップ角をより細かく分割することで、ステッピングモーターのスムーズな運転や低振動を実現します。マイクロステップ励磁はトルク密度を犠牲にしてスムーズな回転を実現することができます。
励磁方式の選択は、ステッピングモーターの応用や要求される性能によって異なります。適切な励磁方式を選択することで、ステッピングモーターのトルク特性を最適化し、目的に応じた効率的な運転を実現できます。
1相励磁と2相励磁によるトルク特性の違い:
1. 1相励磁:
- 1相励磁方式では、ステッピングモーターの各相を1つずつ交互に励磁します。この方式は単純で回路が簡単なため、低コストで実装できます。しかし、1相励磁ではステッピングモーターのトルク特性が低く、低速域でのトルクが不足する傾向があります。

「写真の由来:デュアルシャフト Nema 24 ステッピングモーター 4.2A 4Nm (566 oz.in) 60x60x100mm 4 ワイヤー」
2. 2相励磁:
- 2相励磁方式では、ステッピングモーターの各相を2つずつ同時に励磁します。この方式は1相励磁よりもトルク特性が向上し、特に低速域でのトルクが増加します。2相励磁は1相励磁よりも高いトルク密度を実現できるため、高トルクが必要なアプリケーションに適しています。
その他の励磁方式:
- ハーフステップ励磁:
- ハーフステップ励磁は、1相励磁と2相励磁の中間的な方式であり、ステップ角を半分にすることで解像度を高めつつ、トルク特性を改善することができます。

「写真の由来:Nema 16 バイポーラステッピングモーター 1.8°18Ncm (25.5oz.in) 0.65A 4.55V 39x39x34mm 4 ワイヤー」
- マイクロステップ励磁:
- マイクロステップ励磁は、ステップ角をより細かく分割することで、ステッピングモーターのスムーズな運転や低振動を実現します。マイクロステップ励磁はトルク密度を犠牲にしてスムーズな回転を実現することができます。
励磁方式の選択は、ステッピングモーターの応用や要求される性能によって異なります。適切な励磁方式を選択することで、ステッピングモーターのトルク特性を最適化し、目的に応じた効率的な運転を実現できます。
Posted by maa2ya8 at
15:47
│Comments(0)
2024年12月19日
ブラシレスDCモータとブラシ付きDCモータの比較
ブラシレスDCモータとブラシ付きDCモータは、両方とも直流電動機ですが、それぞれ異なる動作原理と特性を持っています。以下にブラシレスDCモータとブラシ付きDCモータの比較を示します:
ブラシレスDCモータ
特徴:
1. ブラシ不要: ブラシレスDCモータはブラシを使用せず、ローターに永久磁石や磁気センサーを組み込んでいます。
2. 高効率: ブラシレスDCモータはブラシがないため、摩擦が少なく効率が高い特性があります。
3. 低メンテナンス: ブラシレスDCモータは動作中に機械的接触部分が少ないため、メンテナンスが簡単で耐久性が高いです。
4. 高速・高トルク: 高速回転や高トルクを必要とするアプリケーションに適しています。

「写真の由来:24V 4000RPM 0.0625Nm 26W 1.8A 42x42x40mm ブラシレスDCモータ(BLDC)」
利点:
- 高効率
- 低メンテナンス
- 低騒音
- 高速回転可能
ブラシ付きDCモータ
特徴:
1. ブラシ使用: ブラシ付きDCモータは、ブラシとコミュテータを使用して電流を切り替え、ローターを回転させます。
2. 低コスト: ブラシ付きDCモータは比較的低コストで製造されることが一般的です。
3. 低始動トルク: ブラシ付きDCモータは低速域でのトルクが比較的高い特性があります。
4. メンテナンスが必要: ブラシの摩耗によりメンテナンスが必要となることがあります。
利点:
- 低コスト
- 簡単な制御
- 高始動トルク
- 構造がシンプル
比較:
共通点:
- どちらもDC電源を使用して動作する直流モータである。
- どちらも一定のトルクを提供することができる。

「写真の由来:24V 4000RPM 0.125Nm 52.5W 3.4A 42x42x60mm ブラシレスDCモータ(BLDC)」
相違点:
- ブラシレスDCモータは効率が高く、メンテナンスが少ないが、ブラシ付きDCモータは低コストで始動トルクが高い。
- ブラシレスDCモータは高速回転に適しているが、ブラシ付きDCモータは低速域でのトルクが高い。
選択は使用環境や要件によって異なります。高効率や高速回転が必要な場合はブラシレスDCモータが適しており、低コストや高始動トルクが必要な場合はブラシ付きDCモータが適しています。
ブラシレスDCモータ
特徴:
1. ブラシ不要: ブラシレスDCモータはブラシを使用せず、ローターに永久磁石や磁気センサーを組み込んでいます。
2. 高効率: ブラシレスDCモータはブラシがないため、摩擦が少なく効率が高い特性があります。
3. 低メンテナンス: ブラシレスDCモータは動作中に機械的接触部分が少ないため、メンテナンスが簡単で耐久性が高いです。
4. 高速・高トルク: 高速回転や高トルクを必要とするアプリケーションに適しています。

「写真の由来:24V 4000RPM 0.0625Nm 26W 1.8A 42x42x40mm ブラシレスDCモータ(BLDC)」
利点:
- 高効率
- 低メンテナンス
- 低騒音
- 高速回転可能
ブラシ付きDCモータ
特徴:
1. ブラシ使用: ブラシ付きDCモータは、ブラシとコミュテータを使用して電流を切り替え、ローターを回転させます。
2. 低コスト: ブラシ付きDCモータは比較的低コストで製造されることが一般的です。
3. 低始動トルク: ブラシ付きDCモータは低速域でのトルクが比較的高い特性があります。
4. メンテナンスが必要: ブラシの摩耗によりメンテナンスが必要となることがあります。
利点:
- 低コスト
- 簡単な制御
- 高始動トルク
- 構造がシンプル
比較:
共通点:
- どちらもDC電源を使用して動作する直流モータである。
- どちらも一定のトルクを提供することができる。

「写真の由来:24V 4000RPM 0.125Nm 52.5W 3.4A 42x42x60mm ブラシレスDCモータ(BLDC)」
相違点:
- ブラシレスDCモータは効率が高く、メンテナンスが少ないが、ブラシ付きDCモータは低コストで始動トルクが高い。
- ブラシレスDCモータは高速回転に適しているが、ブラシ付きDCモータは低速域でのトルクが高い。
選択は使用環境や要件によって異なります。高効率や高速回転が必要な場合はブラシレスDCモータが適しており、低コストや高始動トルクが必要な場合はブラシ付きDCモータが適しています。
Posted by maa2ya8 at
15:13
│Comments(0)
2024年12月11日
リニアステッピングモータの静音性と振動制御技術
リニアステッピングモータの静音性と振動制御技術を向上させるためには、以下のような方法や技術が考えられます:
静音性向上のための技術:
1. マイクロステップ駆動:
- マイクロステップ駆動を使用することで、ステッピングモータのステップ角を微調整し、振動やノイズを低減させることができます。

「写真の由来:NEMA 8 エクスターナルリニアステッピングモータ 8E15S0504DC5-100RS 0.02Nm ねじリード 4mm(0.1575") 長さ 100mm」
2. 電流制御の最適化:
- 適切な電流制御を行うことで、モーターの振動とノイズを最小限に抑えることができます。
3. 適切なドライバーの選択:
- 静音性に優れたステッピングモータードライバーを選択することで、モーターの駆動に伴うノイズを低減させることができます。
4. 低振動デザイン:
- モーターやリニアステージの構造を最適化し、振動を抑制する設計を採用することで、静音性を向上させることができます。
振動制御技術:
1. 振動ダンピング:
- 振動を吸収するためのダンピング材料や機構を導入することで、振動を制御し、静音性を向上させることができます。

「写真の由来:NEMA 17 エクスターナルリニアステッピングモータ 17E19S2504BSM5-150RS 0.5Nm ねじリード 1mm(0.03937") 長さ 150mm」
2. リニアエンコーダーの使用:
- リニアエンコーダーを組み合わせることで、位置検出精度を向上させると同時に、振動を抑制することができます。
3. 共振周波数の調整:
- モーターや機械系の共振周波数を調整することで、振動を抑制し、静音性を向上させることができます。
4. 振動減衰材の使用:
- 振動減衰材をモーターや機械系に適切に配置することで、振動を吸収し、静音性を向上させることができます。
これらの技術や方法を組み合わせることで、リニアステッピングモータの静音性と振動制御を効果的に向上させることができます。適切な設計や制御手法を選択し、環境に合わせて最適化を行うことが重要です。
静音性向上のための技術:
1. マイクロステップ駆動:
- マイクロステップ駆動を使用することで、ステッピングモータのステップ角を微調整し、振動やノイズを低減させることができます。

「写真の由来:NEMA 8 エクスターナルリニアステッピングモータ 8E15S0504DC5-100RS 0.02Nm ねじリード 4mm(0.1575") 長さ 100mm」
2. 電流制御の最適化:
- 適切な電流制御を行うことで、モーターの振動とノイズを最小限に抑えることができます。
3. 適切なドライバーの選択:
- 静音性に優れたステッピングモータードライバーを選択することで、モーターの駆動に伴うノイズを低減させることができます。
4. 低振動デザイン:
- モーターやリニアステージの構造を最適化し、振動を抑制する設計を採用することで、静音性を向上させることができます。
振動制御技術:
1. 振動ダンピング:
- 振動を吸収するためのダンピング材料や機構を導入することで、振動を制御し、静音性を向上させることができます。

「写真の由来:NEMA 17 エクスターナルリニアステッピングモータ 17E19S2504BSM5-150RS 0.5Nm ねじリード 1mm(0.03937") 長さ 150mm」
2. リニアエンコーダーの使用:
- リニアエンコーダーを組み合わせることで、位置検出精度を向上させると同時に、振動を抑制することができます。
3. 共振周波数の調整:
- モーターや機械系の共振周波数を調整することで、振動を抑制し、静音性を向上させることができます。
4. 振動減衰材の使用:
- 振動減衰材をモーターや機械系に適切に配置することで、振動を吸収し、静音性を向上させることができます。
これらの技術や方法を組み合わせることで、リニアステッピングモータの静音性と振動制御を効果的に向上させることができます。適切な設計や制御手法を選択し、環境に合わせて最適化を行うことが重要です。
Posted by maa2ya8 at
16:13
│Comments(0)
2024年12月05日
電気自動車におけるBLDCモーターの重要性
電気自動車(EV)において、ブラシレス直流モーター(BLDCモーター)は重要な役割を果たしています。以下に、BLDCモーターが電気自動車において重要な理由をいくつか挙げてみます:
1. 高効率とエネルギー効率
- 高効率性: BLDCモーターは、ブラシモーターと比較して効率が高く、エネルギーの無駄を最小限に抑えることができます。これは電気自動車の航続距離を向上させる重要な要素です。

「写真の由来:36V 4000RPM 0.33Nm 138W 5.0A Ф57x89mm ブラシレスDCモータ(BLDC)」
2. 高トルクと高性能
- 高トルク: BLDCモーターは高いトルクを発生させることができ、加速性能が優れています。これにより、電気自動車はスムーズで迅速な加速を実現できます。
3. メンテナンスの簡素化
- メンテナンスフリー: ブラシレスモーターはブラシモーターよりも部品数が少なく、摩耗が少ないため、メンテナンスが簡素化されます。これは電気自動車の整備や保守コストを低減することにつながります。

「写真の由来:Ф43.2x21.6mm アウターロータ型ブラシレスDCモータ 24V 5250RPM 0.084Nm 50W 2.6A」
4. 静音性とスムーズな動作
- 静音性: BLDCモーターは振動や騒音が少ないため、電気自動車の静かな運転に貢献します。また、スムーズな動作が可能であり、快適性を向上させます。
5. 高い制御性と精度
- 制御性と精度: BLDCモーターは高度な制御が可能であり、電子制御によって効率的かつ精密な運転が実現できます。これは電気自動車の走行安定性や運転性能を向上させます。
これらの理由から、BLDCモーターは電気自動車において重要な要素となっており、高性能かつ効率的な走行を実現するために広く採用されています。
1. 高効率とエネルギー効率
- 高効率性: BLDCモーターは、ブラシモーターと比較して効率が高く、エネルギーの無駄を最小限に抑えることができます。これは電気自動車の航続距離を向上させる重要な要素です。

「写真の由来:36V 4000RPM 0.33Nm 138W 5.0A Ф57x89mm ブラシレスDCモータ(BLDC)」
2. 高トルクと高性能
- 高トルク: BLDCモーターは高いトルクを発生させることができ、加速性能が優れています。これにより、電気自動車はスムーズで迅速な加速を実現できます。
3. メンテナンスの簡素化
- メンテナンスフリー: ブラシレスモーターはブラシモーターよりも部品数が少なく、摩耗が少ないため、メンテナンスが簡素化されます。これは電気自動車の整備や保守コストを低減することにつながります。

「写真の由来:Ф43.2x21.6mm アウターロータ型ブラシレスDCモータ 24V 5250RPM 0.084Nm 50W 2.6A」
4. 静音性とスムーズな動作
- 静音性: BLDCモーターは振動や騒音が少ないため、電気自動車の静かな運転に貢献します。また、スムーズな動作が可能であり、快適性を向上させます。
5. 高い制御性と精度
- 制御性と精度: BLDCモーターは高度な制御が可能であり、電子制御によって効率的かつ精密な運転が実現できます。これは電気自動車の走行安定性や運転性能を向上させます。
これらの理由から、BLDCモーターは電気自動車において重要な要素となっており、高性能かつ効率的な走行を実現するために広く採用されています。
Posted by maa2ya8 at
12:37
│Comments(0)
2024年11月27日
スピンドルモーターの駆動技術
スピンドルモーターは、高速回転や高トルクを要求されるアプリケーションで使用されるモーターです。以下にスピンドルモーターの駆動技術について説明します:
スピンドルモーターの駆動技術
1. 高速回転と精密制御:
- スピンドルモーターは高速回転が可能であり、このため正確な速度制御が重要です。高い回転数での安定性を維持するため、モーターの駆動技術は速度の精密な制御を可能にする必要があります。

「写真の由来:CNC水冷スピンドルモーター110V 1.5KW 24000RPM 400Hz ER11コレット CNCインバータ(VFD)モーター」
2. モータードライブ:
- スピンドルモーターを効果的に駆動するためには、適切なモータードライブが必要です。モータードライブは電力を制御し、モーターに適切な電流や電圧を供給して回転を制御します。
3. センサーテクノロジー:
- スピンドルモーターの駆動技術には、回転速度や位置を正確に検出するためのセンサーテクノロジーが重要です。エンコーダーやホールセンサーなどのセンサーを使用して、モーターの回転状態をリアルタイムで監視し、制御にフィードバックします。
4. 電力供給の安定性:
- スピンドルモーターは高負荷での動作が求められるため、電力供給の安定性が重要です。適切な電力供給を確保するために、モーターの駆動技術は電力の波形制御やノイズ対策などの工夫を施します。

「写真の由来:CNCスクエアスピンドルモータ空冷 220V 2.2KW 10A 18000RPM 300Hz ER25コレット」
5. トルク制御:
- スピンドルモーターの駆動技術は、トルク制御も重要な要素です。モーターの負荷変動に対応し、安定したトルクを提供することで、モーターの効率性や信頼性を向上させます。
6. 熱管理:
- 高速回転により発生する熱を効果的に管理することも重要です。スピンドルモーターの駆動技術には、熱の発散や冷却に関する設計が含まれており、過熱を防ぎながら長時間の運転を可能にします。
スピンドルモーターの駆動技術は、高速回転や高精度制御を実現するための複雑な要素が組み合わさっています。適切な駆動技術と制御システムにより、スピンドルモーターは様々な産業分野で幅広く活用されています。
スピンドルモーターの駆動技術
1. 高速回転と精密制御:
- スピンドルモーターは高速回転が可能であり、このため正確な速度制御が重要です。高い回転数での安定性を維持するため、モーターの駆動技術は速度の精密な制御を可能にする必要があります。

「写真の由来:CNC水冷スピンドルモーター110V 1.5KW 24000RPM 400Hz ER11コレット CNCインバータ(VFD)モーター」
2. モータードライブ:
- スピンドルモーターを効果的に駆動するためには、適切なモータードライブが必要です。モータードライブは電力を制御し、モーターに適切な電流や電圧を供給して回転を制御します。
3. センサーテクノロジー:
- スピンドルモーターの駆動技術には、回転速度や位置を正確に検出するためのセンサーテクノロジーが重要です。エンコーダーやホールセンサーなどのセンサーを使用して、モーターの回転状態をリアルタイムで監視し、制御にフィードバックします。
4. 電力供給の安定性:
- スピンドルモーターは高負荷での動作が求められるため、電力供給の安定性が重要です。適切な電力供給を確保するために、モーターの駆動技術は電力の波形制御やノイズ対策などの工夫を施します。

「写真の由来:CNCスクエアスピンドルモータ空冷 220V 2.2KW 10A 18000RPM 300Hz ER25コレット」
5. トルク制御:
- スピンドルモーターの駆動技術は、トルク制御も重要な要素です。モーターの負荷変動に対応し、安定したトルクを提供することで、モーターの効率性や信頼性を向上させます。
6. 熱管理:
- 高速回転により発生する熱を効果的に管理することも重要です。スピンドルモーターの駆動技術には、熱の発散や冷却に関する設計が含まれており、過熱を防ぎながら長時間の運転を可能にします。
スピンドルモーターの駆動技術は、高速回転や高精度制御を実現するための複雑な要素が組み合わさっています。適切な駆動技術と制御システムにより、スピンドルモーターは様々な産業分野で幅広く活用されています。
Posted by maa2ya8 at
15:33
│Comments(0)
2024年11月21日
リニアステッピングモータのトルク特性と負荷制御
リニアステッピングモーターは、直線的な運動を提供するために使用されるステッピングモーターの一種です。リニアステッピングモーターのトルク特性と負荷制御について以下に説明します:
リニアステッピングモーターのトルク特性:
1. 定格トルク:
- リニアステッピングモーターの定格トルクは、通常、特定の電流や周波数での動作時に発揮されるトルクの値を示します。

「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504SC5-150RS 0.02Nm ねじリード 1mm(0.03937") 長さ 150mm」
2. トルク-速度特性:
- リニアステッピングモーターは、回転ステップごとに一定のトルクを発生します。これにより、特定の速度範囲でのトルク特性が得られます。
3. トルク-電流特性:
- リニアステッピングモーターのトルクは、供給される電流に比例します。電流が増加するとトルクも増加しますが、過剰な電流供給は過熱や効率低下を引き起こす可能性があります。
リニアステッピングモーターの負荷制御:
1. 最適な電流制御:
- リニアステッピングモーターの負荷制御には、最適な電流制御が重要です。適切な電流制御を行うことで、モーターが最適なトルクを発揮し、効率的に動作します。
2. 微調整可能な制御パラメータ:
- リニアステッピングモーターの制御システムには、トルクや速度などのパラメータを微調整できる機能を備えることで、負荷に応じた制御が可能となります。

「写真の由来:Nema 17 エクスターナルリニアステッピングモータ 17E13S0404MB-032RB 26Ncm 8mm/0.31496" 長さ 32mm」
3. 負荷センサーの活用:
- リニアステッピングモーターには、負荷センサーを組み込むことで、負荷の変化を検知し、制御システムがリアルタイムで適切な調整を行うことができます。
4. 閉ループ制御の導入:
- リニアステッピングモーターの負荷制御には、閉ループ制御システムを導入することで、外部負荷に対する適応性や精度を向上させることができます。
これらのトルク特性と負荷制御の要素を適切に考慮することで、リニアステッピングモーターを効果的に制御し、正確で安定した直線運動を実現することが可能となります。
リニアステッピングモーターのトルク特性:
1. 定格トルク:
- リニアステッピングモーターの定格トルクは、通常、特定の電流や周波数での動作時に発揮されるトルクの値を示します。

「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504SC5-150RS 0.02Nm ねじリード 1mm(0.03937") 長さ 150mm」
2. トルク-速度特性:
- リニアステッピングモーターは、回転ステップごとに一定のトルクを発生します。これにより、特定の速度範囲でのトルク特性が得られます。
3. トルク-電流特性:
- リニアステッピングモーターのトルクは、供給される電流に比例します。電流が増加するとトルクも増加しますが、過剰な電流供給は過熱や効率低下を引き起こす可能性があります。
リニアステッピングモーターの負荷制御:
1. 最適な電流制御:
- リニアステッピングモーターの負荷制御には、最適な電流制御が重要です。適切な電流制御を行うことで、モーターが最適なトルクを発揮し、効率的に動作します。
2. 微調整可能な制御パラメータ:
- リニアステッピングモーターの制御システムには、トルクや速度などのパラメータを微調整できる機能を備えることで、負荷に応じた制御が可能となります。

「写真の由来:Nema 17 エクスターナルリニアステッピングモータ 17E13S0404MB-032RB 26Ncm 8mm/0.31496" 長さ 32mm」
3. 負荷センサーの活用:
- リニアステッピングモーターには、負荷センサーを組み込むことで、負荷の変化を検知し、制御システムがリアルタイムで適切な調整を行うことができます。
4. 閉ループ制御の導入:
- リニアステッピングモーターの負荷制御には、閉ループ制御システムを導入することで、外部負荷に対する適応性や精度を向上させることができます。
これらのトルク特性と負荷制御の要素を適切に考慮することで、リニアステッピングモーターを効果的に制御し、正確で安定した直線運動を実現することが可能となります。
Posted by maa2ya8 at
12:26
│Comments(0)
2024年11月14日
小型DCモーターが動かない場合、考えられる原因について
小型DCモーターが動かない場合、その原因はさまざまです。以下に一般的な原因として考えられるものをいくつか挙げます:
1. 電源供給:
- モーターに適切な電力供給がされているかどうか確認してください。電池が十分に充電されているか、電源が正しく接続されているかを確認しましょう。
2. 配線:
- モーターと電源の間の配線に問題がある可能性があります。配線が断線している、接触が悪い、または誤った配線がされているかを確認してください。

「写真の由来:24V ミニブラシ付きDCギアモーター PA28-28245800-G5 0.24Kg.cm/888RPM、5.18:1 遊星ギアボックス付き」
3. モーターの故障:
- モーター自体に問題がある可能性があります。ブラシの摩耗、巻線の断線、コネクタの破損などが原因であるかもしれません。
4. モータードライバ:
- DCモーターを駆動するためのドライバーに問題がある場合、モーターが正常に動作しないことがあります。ドライバーの設定や接続を確認してください。

「写真の由来:12V ミニブラシ付きDCギヤードモーター PA25-24126000-G107 2.25Kg.cm/42RPM、107.17:1 遊星ギアボックス付き」
5. 制御信号:
- モーターを制御するための信号が正しく送られているかどうかを確認してください。制御信号が適切にモータードライバーに送られているか確認しましょう。
6. 過負荷:
- モーターが設計された容量を超える負荷がかかっている場合、モーターが動かないことがあります。過負荷を避けるために、負荷を軽減するか、より強力なモーターを検討してください。
これらは一般的な原因ですが、実際の原因は状況によって異なります。問題を特定するために、電源供給、配線、モーター自体、モータードライバー、制御信号などを順番に確認していくことが重要です。
1. 電源供給:
- モーターに適切な電力供給がされているかどうか確認してください。電池が十分に充電されているか、電源が正しく接続されているかを確認しましょう。
2. 配線:
- モーターと電源の間の配線に問題がある可能性があります。配線が断線している、接触が悪い、または誤った配線がされているかを確認してください。

「写真の由来:24V ミニブラシ付きDCギアモーター PA28-28245800-G5 0.24Kg.cm/888RPM、5.18:1 遊星ギアボックス付き」
3. モーターの故障:
- モーター自体に問題がある可能性があります。ブラシの摩耗、巻線の断線、コネクタの破損などが原因であるかもしれません。
4. モータードライバ:
- DCモーターを駆動するためのドライバーに問題がある場合、モーターが正常に動作しないことがあります。ドライバーの設定や接続を確認してください。

「写真の由来:12V ミニブラシ付きDCギヤードモーター PA25-24126000-G107 2.25Kg.cm/42RPM、107.17:1 遊星ギアボックス付き」
5. 制御信号:
- モーターを制御するための信号が正しく送られているかどうかを確認してください。制御信号が適切にモータードライバーに送られているか確認しましょう。
6. 過負荷:
- モーターが設計された容量を超える負荷がかかっている場合、モーターが動かないことがあります。過負荷を避けるために、負荷を軽減するか、より強力なモーターを検討してください。
これらは一般的な原因ですが、実際の原因は状況によって異なります。問題を特定するために、電源供給、配線、モーター自体、モータードライバー、制御信号などを順番に確認していくことが重要です。
Posted by maa2ya8 at
15:31
│Comments(0)
2024年11月07日
シャフトカップリングの故障原因とその予防策
シャフトカップリングの故障原因とその予防策について以下にまとめます:
故障原因:
1. 過負荷: シャフトカップリングが設計された負荷を超えると、歪みや破損が発生しやすくなります。
2. 振動: 過度の振動は、シャフトカップリングの歪みや疲労を引き起こし、故障の原因となります。

「写真の由来:10mm-12mmフレキシブルジョーカップリング 30x40mm CNCステッピング モータシャフトカップリング」
3. 誤った取り付け: シャフトカップリングが正しく取り付けられていないと、負荷が均等に分散されず、不均等な応力が発生して故障を引き起こす可能性があります。
4. 環境要因: 湿気や腐食、異物の侵入などの環境要因がシャフトカップリングの劣化や故障を促進することがあります。
予防策:
1. 正しい選択: 適切なサイズやタイプのシャフトカップリングを選択し、過負荷を避けます。
2. 定期点検: 定期的な点検とメンテナンスを行い、異常を早期に発見して修理することが重要です。

「写真の由来:5mm-6.35mm リジッドカップリング 25x30mm CNCステッピング モータシャフトカップリング」
3. 適切な取り付け: シャフトカップリングを正しく取り付け、適切なトルクで締め付けます。
4. 振動対策: 振動を抑制するため、適切なバランサーやダンパーを設置します。
5. 環境管理: シャフトカップリングが設置される環境を管理し、湿気や異物の侵入を防ぎます。
6. 定期交換: 耐用年数やメーカーの推奨に基づいて、定期的にシャフトカップリングを交換します。
これらの予防策を実践することで、シャフトカップリングの故障を減らし、機械全体の信頼性を向上させることができます。
故障原因:
1. 過負荷: シャフトカップリングが設計された負荷を超えると、歪みや破損が発生しやすくなります。
2. 振動: 過度の振動は、シャフトカップリングの歪みや疲労を引き起こし、故障の原因となります。

「写真の由来:10mm-12mmフレキシブルジョーカップリング 30x40mm CNCステッピング モータシャフトカップリング」
3. 誤った取り付け: シャフトカップリングが正しく取り付けられていないと、負荷が均等に分散されず、不均等な応力が発生して故障を引き起こす可能性があります。
4. 環境要因: 湿気や腐食、異物の侵入などの環境要因がシャフトカップリングの劣化や故障を促進することがあります。
予防策:
1. 正しい選択: 適切なサイズやタイプのシャフトカップリングを選択し、過負荷を避けます。
2. 定期点検: 定期的な点検とメンテナンスを行い、異常を早期に発見して修理することが重要です。

「写真の由来:5mm-6.35mm リジッドカップリング 25x30mm CNCステッピング モータシャフトカップリング」
3. 適切な取り付け: シャフトカップリングを正しく取り付け、適切なトルクで締め付けます。
4. 振動対策: 振動を抑制するため、適切なバランサーやダンパーを設置します。
5. 環境管理: シャフトカップリングが設置される環境を管理し、湿気や異物の侵入を防ぎます。
6. 定期交換: 耐用年数やメーカーの推奨に基づいて、定期的にシャフトカップリングを交換します。
これらの予防策を実践することで、シャフトカップリングの故障を減らし、機械全体の信頼性を向上させることができます。
Posted by maa2ya8 at
15:35
│Comments(0)
2024年10月30日
クローズドループステッピングモータの設計と制御方法
クローズドループステッピングモータの設計と制御方法について簡単に説明します。
ステッピングモータの基本
- ステッピングモータは、パルス信号を受け取り、1ステップごとに一定角度だけ回転するモータです。
- クローズドループ制御は、モータの位置や速度をフィードバックして制御する方法です。

「写真の由来:Nema 11 ギヤードクローズドループステッピングモーター 0.07Nm/9.91oz.in エンコーダ 300CPR」
設計と制御方法
1. ステッピングモータの選定:
- 必要なトルク、速度、精度などの要件に基づいて適切なステッピングモータを選定します。
2. ドライバ回路の設計:
- ステッピングモータを制御するためのドライバ回路を設計します。ドライバは、パルス信号を受け取り、モータに正確な制御信号を送る役割を果たします。
3. クローズドループシステムの構築:
- モータの軸にエンコーダやホール効果センサなどの位置センサを取り付け、モータの位置や速度をリアルタイムで計測します。

「写真の由来:Nema 34 クローズドループステッピングモーター Pシリーズ 4.5Nm/637.38oz.in 電磁ブレーキ付き」
4. フィードバック制御の実装:
- モータの現在位置と目標位置の差を計算し、それに基づいてモータに正確なパルス信号を送信することで、位置を制御します。
5. PID制御の適用:
- 比例 (P)、積分 (I)、微分 (D) 制御を組み合わせたPID制御を使用して、モータの位置を正確に制御します。
6. モータドライバの制御信号:
- 制御信号は、モータドライバに送られ、モータの回転を制御します。この信号は、モータの回転方向やステップ数を指定します。
7. 制御アルゴリズムの最適化:
- 制御アルゴリズムを最適化して、モータの効率的な動作と正確な位置制御を実現します。
以上が、クローズドループステッピングモータの設計と制御方法の基本的な手順です。これにより、高精度な位置制御や速度制御を実現し、様々な産業分野で利用されています。
ステッピングモータの基本
- ステッピングモータは、パルス信号を受け取り、1ステップごとに一定角度だけ回転するモータです。
- クローズドループ制御は、モータの位置や速度をフィードバックして制御する方法です。

「写真の由来:Nema 11 ギヤードクローズドループステッピングモーター 0.07Nm/9.91oz.in エンコーダ 300CPR」
設計と制御方法
1. ステッピングモータの選定:
- 必要なトルク、速度、精度などの要件に基づいて適切なステッピングモータを選定します。
2. ドライバ回路の設計:
- ステッピングモータを制御するためのドライバ回路を設計します。ドライバは、パルス信号を受け取り、モータに正確な制御信号を送る役割を果たします。
3. クローズドループシステムの構築:
- モータの軸にエンコーダやホール効果センサなどの位置センサを取り付け、モータの位置や速度をリアルタイムで計測します。

「写真の由来:Nema 34 クローズドループステッピングモーター Pシリーズ 4.5Nm/637.38oz.in 電磁ブレーキ付き」
4. フィードバック制御の実装:
- モータの現在位置と目標位置の差を計算し、それに基づいてモータに正確なパルス信号を送信することで、位置を制御します。
5. PID制御の適用:
- 比例 (P)、積分 (I)、微分 (D) 制御を組み合わせたPID制御を使用して、モータの位置を正確に制御します。
6. モータドライバの制御信号:
- 制御信号は、モータドライバに送られ、モータの回転を制御します。この信号は、モータの回転方向やステップ数を指定します。
7. 制御アルゴリズムの最適化:
- 制御アルゴリズムを最適化して、モータの効率的な動作と正確な位置制御を実現します。
以上が、クローズドループステッピングモータの設計と制御方法の基本的な手順です。これにより、高精度な位置制御や速度制御を実現し、様々な産業分野で利用されています。
Posted by maa2ya8 at
16:39
│Comments(0)
2024年10月24日
ギヤードモータの効率と寿命を向上させるにはどうすればよいか?
ギヤードモーターの効率と寿命を向上させるためには、以下のような手法や注意点が考慮されるべきです:
効率向上のための方法:
1. 適切な選定:
- 必要なトルクや回転数に合わせて適切なギヤードモーターを選定することが重要です。過大または過小な能力のモーターを使用すると、効率が低下し寿命が短くなる可能性があります。

「写真の由来:Nema 14 ステッピングモーターバイポーラ L=33mmとギヤ比51:1遊星ギアボックス」
2. 最適な歯車設計:
- 歯車の設計が重要であり、摩擦損失を最小限に抑えるために適切な歯車形状と材料を選択する必要があります。
3. 適切な潤滑:
- 歯車や軸受などの摩擦部分に適切な潤滑油を使用し、適切な保守を行うことで機械の効率を向上させることができます。
4. 定期的なメンテナンス:
- ギヤードモーターのメンテナンスを定期的に行うことで、劣化や摩耗を早期に発見し、対策を取ることができます。
寿命延長のための方法:
1. 過負荷の防止:
- ギヤードモーターを設計された範囲内で使用することで、過負荷を避け、寿命を延ばすことができます。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=38mmとギヤ比 27:1 遊星ギアボックス」
2. 適切な熱管理:
- 過熱を防ぐために適切な冷却措置を講じることが重要です。過熱は潤滑油の劣化や部品の変形を引き起こす可能性があります。
3. 振動と衝撃の管理:
- 振動や衝撃は機械部品にダメージを与える可能性があるため、これらを最小限に抑えるように注意することが重要です。
4. 適切な環境条件:
- ギヤードモーターが設置される環境条件(湿度、温度、塵埃など)を適切に管理することで、寿命を延ばすことができます。
これらの手法を組み合わせて、ギヤードモーターの効率と寿命を最大限に向上させることが可能です。また、製造元の指示に従い、適切な取り扱いとメンテナンスを行うことも重要です。
効率向上のための方法:
1. 適切な選定:
- 必要なトルクや回転数に合わせて適切なギヤードモーターを選定することが重要です。過大または過小な能力のモーターを使用すると、効率が低下し寿命が短くなる可能性があります。

「写真の由来:Nema 14 ステッピングモーターバイポーラ L=33mmとギヤ比51:1遊星ギアボックス」
2. 最適な歯車設計:
- 歯車の設計が重要であり、摩擦損失を最小限に抑えるために適切な歯車形状と材料を選択する必要があります。
3. 適切な潤滑:
- 歯車や軸受などの摩擦部分に適切な潤滑油を使用し、適切な保守を行うことで機械の効率を向上させることができます。
4. 定期的なメンテナンス:
- ギヤードモーターのメンテナンスを定期的に行うことで、劣化や摩耗を早期に発見し、対策を取ることができます。
寿命延長のための方法:
1. 過負荷の防止:
- ギヤードモーターを設計された範囲内で使用することで、過負荷を避け、寿命を延ばすことができます。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=38mmとギヤ比 27:1 遊星ギアボックス」
2. 適切な熱管理:
- 過熱を防ぐために適切な冷却措置を講じることが重要です。過熱は潤滑油の劣化や部品の変形を引き起こす可能性があります。
3. 振動と衝撃の管理:
- 振動や衝撃は機械部品にダメージを与える可能性があるため、これらを最小限に抑えるように注意することが重要です。
4. 適切な環境条件:
- ギヤードモーターが設置される環境条件(湿度、温度、塵埃など)を適切に管理することで、寿命を延ばすことができます。
これらの手法を組み合わせて、ギヤードモーターの効率と寿命を最大限に向上させることが可能です。また、製造元の指示に従い、適切な取り扱いとメンテナンスを行うことも重要です。
Posted by maa2ya8 at
11:55
│Comments(0)