2024年10月30日
クローズドループステッピングモータの設計と制御方法
クローズドループステッピングモータの設計と制御方法について簡単に説明します。
ステッピングモータの基本
- ステッピングモータは、パルス信号を受け取り、1ステップごとに一定角度だけ回転するモータです。
- クローズドループ制御は、モータの位置や速度をフィードバックして制御する方法です。

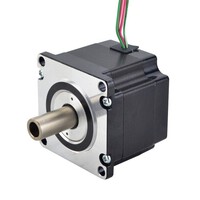
「写真の由来:Nema 11 ギヤードクローズドループステッピングモーター 0.07Nm/9.91oz.in エンコーダ 300CPR」
設計と制御方法
1. ステッピングモータの選定:
- 必要なトルク、速度、精度などの要件に基づいて適切なステッピングモータを選定します。
2. ドライバ回路の設計:
- ステッピングモータを制御するためのドライバ回路を設計します。ドライバは、パルス信号を受け取り、モータに正確な制御信号を送る役割を果たします。
3. クローズドループシステムの構築:
- モータの軸にエンコーダやホール効果センサなどの位置センサを取り付け、モータの位置や速度をリアルタイムで計測します。

「写真の由来:Nema 34 クローズドループステッピングモーター Pシリーズ 4.5Nm/637.38oz.in 電磁ブレーキ付き」
4. フィードバック制御の実装:
- モータの現在位置と目標位置の差を計算し、それに基づいてモータに正確なパルス信号を送信することで、位置を制御します。
5. PID制御の適用:
- 比例 (P)、積分 (I)、微分 (D) 制御を組み合わせたPID制御を使用して、モータの位置を正確に制御します。
6. モータドライバの制御信号:
- 制御信号は、モータドライバに送られ、モータの回転を制御します。この信号は、モータの回転方向やステップ数を指定します。
7. 制御アルゴリズムの最適化:
- 制御アルゴリズムを最適化して、モータの効率的な動作と正確な位置制御を実現します。
以上が、クローズドループステッピングモータの設計と制御方法の基本的な手順です。これにより、高精度な位置制御や速度制御を実現し、様々な産業分野で利用されています。
ステッピングモータの基本
- ステッピングモータは、パルス信号を受け取り、1ステップごとに一定角度だけ回転するモータです。
- クローズドループ制御は、モータの位置や速度をフィードバックして制御する方法です。

「写真の由来:Nema 11 ギヤードクローズドループステッピングモーター 0.07Nm/9.91oz.in エンコーダ 300CPR」
設計と制御方法
1. ステッピングモータの選定:
- 必要なトルク、速度、精度などの要件に基づいて適切なステッピングモータを選定します。
2. ドライバ回路の設計:
- ステッピングモータを制御するためのドライバ回路を設計します。ドライバは、パルス信号を受け取り、モータに正確な制御信号を送る役割を果たします。
3. クローズドループシステムの構築:
- モータの軸にエンコーダやホール効果センサなどの位置センサを取り付け、モータの位置や速度をリアルタイムで計測します。

「写真の由来:Nema 34 クローズドループステッピングモーター Pシリーズ 4.5Nm/637.38oz.in 電磁ブレーキ付き」
4. フィードバック制御の実装:
- モータの現在位置と目標位置の差を計算し、それに基づいてモータに正確なパルス信号を送信することで、位置を制御します。
5. PID制御の適用:
- 比例 (P)、積分 (I)、微分 (D) 制御を組み合わせたPID制御を使用して、モータの位置を正確に制御します。
6. モータドライバの制御信号:
- 制御信号は、モータドライバに送られ、モータの回転を制御します。この信号は、モータの回転方向やステップ数を指定します。
7. 制御アルゴリズムの最適化:
- 制御アルゴリズムを最適化して、モータの効率的な動作と正確な位置制御を実現します。
以上が、クローズドループステッピングモータの設計と制御方法の基本的な手順です。これにより、高精度な位置制御や速度制御を実現し、様々な産業分野で利用されています。
Posted by maa2ya8 at 16:39│Comments(0)