2024年03月26日
ステッピングモーターの制御アルゴリズム
ステッピングモーターの制御にはさまざまなアルゴリズムがありますが、以下に代表的な2つのアルゴリズムを説明します:
パルス列制御 (Pulse Train Control):
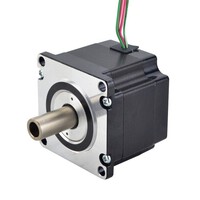
パルス列制御は、最も基本的なステッピングモーターの制御方法です。このアルゴリズムでは、ステッピングモーターにパルス信号を送り、モーターを一定の角度だけステップ回転させます。パルスの周波数やパルス数によって回転速度や回転量を制御します。パルス列制御は比較的シンプルで実装が容易ですが、高速回転や高い位置制御精度が求められる場合には適していません。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
マイクロステップ制御 (Microstepping Control):
マイクロステップ制御は、ステッピングモーターの制御精度を向上させるために開発されたアルゴリズムです。この方法では、パルス信号をより細かいステップに分割し、ステッピングモーターをより滑らかに制御します。具体的には、パルス信号をパルス幅変調 (PWM) によって調整し、モーターの電流を制御することで微小なステップを実現します。マイクロステップ制御はより高い位置制御精度と滑らかなモーター運動を実現できますが、制御回路の複雑さやコストが増すことがあります。

「写真の由来:Nema 23 一体型ステッピングモータ ドライバ付 190 Ncm(269oz.in) ISD04 12-38VDC」
これらのアルゴリズムは、ステッピングモーターの特性や制御要件に応じて選択されます。また、位置検出やモーションプロファイルの考慮、加速・減速制御など、より高度な制御機能を実現するために他のアルゴリズムや制御テクニックが組み合わされることもあります。
パルス列制御 (Pulse Train Control):
パルス列制御は、最も基本的なステッピングモーターの制御方法です。このアルゴリズムでは、ステッピングモーターにパルス信号を送り、モーターを一定の角度だけステップ回転させます。パルスの周波数やパルス数によって回転速度や回転量を制御します。パルス列制御は比較的シンプルで実装が容易ですが、高速回転や高い位置制御精度が求められる場合には適していません。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
マイクロステップ制御 (Microstepping Control):
マイクロステップ制御は、ステッピングモーターの制御精度を向上させるために開発されたアルゴリズムです。この方法では、パルス信号をより細かいステップに分割し、ステッピングモーターをより滑らかに制御します。具体的には、パルス信号をパルス幅変調 (PWM) によって調整し、モーターの電流を制御することで微小なステップを実現します。マイクロステップ制御はより高い位置制御精度と滑らかなモーター運動を実現できますが、制御回路の複雑さやコストが増すことがあります。

「写真の由来:Nema 23 一体型ステッピングモータ ドライバ付 190 Ncm(269oz.in) ISD04 12-38VDC」
これらのアルゴリズムは、ステッピングモーターの特性や制御要件に応じて選択されます。また、位置検出やモーションプロファイルの考慮、加速・減速制御など、より高度な制御機能を実現するために他のアルゴリズムや制御テクニックが組み合わされることもあります。
Posted by maa2ya8 at
15:41
│Comments(0)
2024年03月18日
リニアステッピングモータの駆動と制御
リニアステッピングモータ(Linear Stepper Motor)の駆動と制御について説明します。
駆動方法:
リニアステッピングモータは、ステップモータと同様にパルス信号を使用して駆動します。モーターにパルス信号を送ることで、モーターがステップごとに一定の距離を移動します。リニアステッピングモータは、ローターとステーターの間に磁石が配置されており、電流を流すことで磁場を生成し、モーターを駆動します。
制御方法:
リニアステッピングモータを制御するためには、以下の手順を実行する必要があります。
a. パルスジェネレータ: パルスジェネレータは、モーターに対してパルス信号を生成するための装置です。パルスジェネレータは、指定された速度や移動距離に基づいてパルス信号を生成します。
b. ドライバ回路: パルスジェネレータから生成されたパルス信号は、ドライバ回路に送られます。ドライバ回路は、パルス信号を電流に変換し、モーターに供給します。ドライバ回路はまた、パルス信号の方向を制御するための制御信号も受け取ります。

「写真の由来:Nema 17 エクスターナルリニアステッピングモータ (バックラッシ防止ねじナット付)」
c. 制御信号: 制御信号は、モーターを制御するための追加の信号です。これには、ホームセンサーからの信号やリミットスイッチからの信号などが含まれます。制御信号は、モーターの位置検出や制限を管理するために使用されます。
制御手法:
リニアステッピングモータの制御には、いくつかの手法があります。
a. オープンループ制御: オープンループ制御では、パルス信号の数と順序を制御してモーターを駆動します。ただし、この方法ではモーターの位置や速度のフィードバックを得ることができず、位置の正確性や制御の安定性に制限があります。

「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504SC5-150RS 0.02Nm ねじリード 1mm(0.03937") 長さ 150mm」
b. クローズドループ制御: クローズドループ制御では、エンコーダやホール効果センサなどのフィードバックデバイスを使用して、モーターの位置や速度を計測します。これにより、より正確な位置制御や速度制御が可能となります。
c. ステップダイレクション制御: ステップダイレクション制御では、パルス信号の数と方向を制御してモーターを駆動します。この制御方法は、単純で使いやすく、多くのアプリケーションで広く使用されています。
リニアステッピングモータの駆動と制御は、モーターの設計やアプリケーションによって異なる場合があります。モーターのメーカーの指示に従い、適切な駆動回路や制御手法を選択することが重要です。
駆動方法:
リニアステッピングモータは、ステップモータと同様にパルス信号を使用して駆動します。モーターにパルス信号を送ることで、モーターがステップごとに一定の距離を移動します。リニアステッピングモータは、ローターとステーターの間に磁石が配置されており、電流を流すことで磁場を生成し、モーターを駆動します。
制御方法:
リニアステッピングモータを制御するためには、以下の手順を実行する必要があります。
a. パルスジェネレータ: パルスジェネレータは、モーターに対してパルス信号を生成するための装置です。パルスジェネレータは、指定された速度や移動距離に基づいてパルス信号を生成します。
b. ドライバ回路: パルスジェネレータから生成されたパルス信号は、ドライバ回路に送られます。ドライバ回路は、パルス信号を電流に変換し、モーターに供給します。ドライバ回路はまた、パルス信号の方向を制御するための制御信号も受け取ります。

「写真の由来:Nema 17 エクスターナルリニアステッピングモータ (バックラッシ防止ねじナット付)」
c. 制御信号: 制御信号は、モーターを制御するための追加の信号です。これには、ホームセンサーからの信号やリミットスイッチからの信号などが含まれます。制御信号は、モーターの位置検出や制限を管理するために使用されます。
制御手法:
リニアステッピングモータの制御には、いくつかの手法があります。
a. オープンループ制御: オープンループ制御では、パルス信号の数と順序を制御してモーターを駆動します。ただし、この方法ではモーターの位置や速度のフィードバックを得ることができず、位置の正確性や制御の安定性に制限があります。

「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504SC5-150RS 0.02Nm ねじリード 1mm(0.03937") 長さ 150mm」
b. クローズドループ制御: クローズドループ制御では、エンコーダやホール効果センサなどのフィードバックデバイスを使用して、モーターの位置や速度を計測します。これにより、より正確な位置制御や速度制御が可能となります。
c. ステップダイレクション制御: ステップダイレクション制御では、パルス信号の数と方向を制御してモーターを駆動します。この制御方法は、単純で使いやすく、多くのアプリケーションで広く使用されています。
リニアステッピングモータの駆動と制御は、モーターの設計やアプリケーションによって異なる場合があります。モーターのメーカーの指示に従い、適切な駆動回路や制御手法を選択することが重要です。
Posted by maa2ya8 at
16:37
│Comments(0)
2024年03月11日
ブラシレスDCモータの性能評価基準
ブラシレスDCモータの性能評価には、以下のような基準が一般的に使用されます。
効率性: ブラシレスDCモータの効率性は、入力電力に対してどれだけの出力が得られるかを評価します。高い効率性は、電力の節約やエネルギー効率の向上につながります。

「写真の由来:36V 4000RPM 0.33Nm 138W 5.0A Ф57x89mm ブラシレスDCモータ(BLDC)」
トルクと回転数: モータの出力トルクと回転数は、モータの性能を評価する重要な要素です。高いトルクは、負荷のある応用でのパフォーマンス向上に寄与します。また、広い範囲で制御可能な回転数範囲も望ましい特性です。
応答性と制御特性: ブラシレスDCモータは、高い応答性と正確な制御特性が求められます。応答性は、モータが指示に対してどれだけ迅速かつ正確に反応するかを表します。制御特性は、速度制御や位置制御などの制御手法において、モータが要求に応じて正確な動作をする能力を示します。

「写真の由来:24V 4000RPM 0.125Nm 52.5W 3.4A 42x42x60mm ブラシレスDCモータ(BLDC)」
騒音と振動: ブラシレスDCモータの騒音と振動は、特に要求の厳しい応用では重要な要素です。低騒音で低振動のモータは、快適性や環境への影響を軽減することができます。
耐久性と信頼性: 長期にわたって安定したパフォーマンスを維持するためには、ブラシレスDCモータの耐久性と信頼性が重要です。耐久性は、モータが長時間の連続運転や負荷変動に耐える能力を示します。信頼性は、モータの故障や不具合の発生頻度を評価します。
これらの基準を使用して、ブラシレスDCモータの性能を評価することが一般的です。具体的なアプリケーションや要件に応じて、これらの基準の重要性や評価方法は異なる場合があります。
効率性: ブラシレスDCモータの効率性は、入力電力に対してどれだけの出力が得られるかを評価します。高い効率性は、電力の節約やエネルギー効率の向上につながります。

「写真の由来:36V 4000RPM 0.33Nm 138W 5.0A Ф57x89mm ブラシレスDCモータ(BLDC)」
トルクと回転数: モータの出力トルクと回転数は、モータの性能を評価する重要な要素です。高いトルクは、負荷のある応用でのパフォーマンス向上に寄与します。また、広い範囲で制御可能な回転数範囲も望ましい特性です。
応答性と制御特性: ブラシレスDCモータは、高い応答性と正確な制御特性が求められます。応答性は、モータが指示に対してどれだけ迅速かつ正確に反応するかを表します。制御特性は、速度制御や位置制御などの制御手法において、モータが要求に応じて正確な動作をする能力を示します。

「写真の由来:24V 4000RPM 0.125Nm 52.5W 3.4A 42x42x60mm ブラシレスDCモータ(BLDC)」
騒音と振動: ブラシレスDCモータの騒音と振動は、特に要求の厳しい応用では重要な要素です。低騒音で低振動のモータは、快適性や環境への影響を軽減することができます。
耐久性と信頼性: 長期にわたって安定したパフォーマンスを維持するためには、ブラシレスDCモータの耐久性と信頼性が重要です。耐久性は、モータが長時間の連続運転や負荷変動に耐える能力を示します。信頼性は、モータの故障や不具合の発生頻度を評価します。
これらの基準を使用して、ブラシレスDCモータの性能を評価することが一般的です。具体的なアプリケーションや要件に応じて、これらの基準の重要性や評価方法は異なる場合があります。
Posted by maa2ya8 at
16:08
│Comments(0)
2024年03月04日
バイポーラステッピングモータとは何ですか?
バイポーラステッピングモータは、ステッピングモータの一種であり、特定のステップ角度で正確な位置制御を行うために使用されます。バイポーラという用語は、モータのコイルの接続方法に関連しています。
バイポーラステッピングモータの特徴は以下の通りです。
コイル構造: バイポーラステッピングモータは、2つのコイルを持っています。それぞれのコイルは、互いに対称的な位置に配置されており、コイルの中心にはモータの回転軸があります。この構造により、モータの回転方向を制御することが可能です。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
ステップ角度: バイポーラステッピングモータは、一定のステップ角度で回転します。ステップ角度は、モータが1ステップ進むために必要なエネルギーパルスの数によって決まります。多くのバイポーラステッピングモータは、1.8度または0.9度のステップ角度を持っています。
ポジショニング精度: バイポーラステッピングモータは、ステップ単位で正確な位置制御が可能です。モータがステップごとに一定の角度だけ回転するため、特定の位置にモータを停止させることができます。この特性は、精密な位置決めや制御が必要なアプリケーションに適しています。

「写真の由来:Nema 23 バイポーラ 3Nm (425oz.in) 3.5A 57x57x114mm 4 ワイヤー CNC ステッピングモーター」
高トルク: バイポーラステッピングモータは、比較的高いトルクを発生することができます。コイルの構造と磁極の配置により、ステッピングモータは静的および動的なトルクを提供します。この特性は、モーション制御や負荷のあるアプリケーションにおいて重要です。
制御回路: バイポーラステッピングモータを制御するには、専用の制御回路が必要です。この回路は、モータにエネルギーパルスを供給し、正しいステップ角度と回転方向を実現します。一般的に、マイクロコントローラや専用のステッピングモータドライバを使用して制御します。
バイポーラステッピングモータは、精密な位置制御と高いトルクを必要とするアプリケーションで広く使用されています。例えば、3Dプリンター、ロボットアーム、医療機器、自動化装置などで利用されます。バイポーラステッピングモータは、ステップ単位での正確な位置決めが可能であり、制御が比較的簡単であるため、幅広い応用領域で利用されています。
バイポーラステッピングモータの特徴は以下の通りです。
コイル構造: バイポーラステッピングモータは、2つのコイルを持っています。それぞれのコイルは、互いに対称的な位置に配置されており、コイルの中心にはモータの回転軸があります。この構造により、モータの回転方向を制御することが可能です。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
ステップ角度: バイポーラステッピングモータは、一定のステップ角度で回転します。ステップ角度は、モータが1ステップ進むために必要なエネルギーパルスの数によって決まります。多くのバイポーラステッピングモータは、1.8度または0.9度のステップ角度を持っています。
ポジショニング精度: バイポーラステッピングモータは、ステップ単位で正確な位置制御が可能です。モータがステップごとに一定の角度だけ回転するため、特定の位置にモータを停止させることができます。この特性は、精密な位置決めや制御が必要なアプリケーションに適しています。

「写真の由来:Nema 23 バイポーラ 3Nm (425oz.in) 3.5A 57x57x114mm 4 ワイヤー CNC ステッピングモーター」
高トルク: バイポーラステッピングモータは、比較的高いトルクを発生することができます。コイルの構造と磁極の配置により、ステッピングモータは静的および動的なトルクを提供します。この特性は、モーション制御や負荷のあるアプリケーションにおいて重要です。
制御回路: バイポーラステッピングモータを制御するには、専用の制御回路が必要です。この回路は、モータにエネルギーパルスを供給し、正しいステップ角度と回転方向を実現します。一般的に、マイクロコントローラや専用のステッピングモータドライバを使用して制御します。
バイポーラステッピングモータは、精密な位置制御と高いトルクを必要とするアプリケーションで広く使用されています。例えば、3Dプリンター、ロボットアーム、医療機器、自動化装置などで利用されます。バイポーラステッピングモータは、ステップ単位での正確な位置決めが可能であり、制御が比較的簡単であるため、幅広い応用領域で利用されています。
Posted by maa2ya8 at
15:43
│Comments(0)