2023年11月22日
ステッピングモーターの特性について
ステッピングモーターは、以下のような特性を持っています:
ステップ角度: ステッピングモーターは、一定のステップ角度で回転します。例えば、1.8度ステッピングモーターでは、1ステップごとにモーターが1.8度回転します。この特性により、正確な位置制御が可能となります。
精密な位置制御: ステッピングモーターは、ステップ角度に基づいて位置を制御するため、高い位置制御精度が得られます。ステップ数によって位置が決まるため、目標位置までの移動や回転が非常に正確に行われます。

「写真の由来:Nema 23 防水クローズドループステッピングモーター Pシリーズ IP65 2Nm/283.28oz.1000CPRエンコーダ付き」
高トルク発生: ステッピングモーターは、パルス信号によってステップごとに回転します。この特性により、モーターは一定のトルクを発生し続けることができます。特に静止状態でのトルク発生能力が高く、負荷を保持することができます。
オープンループ制御: 通常、ステッピングモーターはオープンループ制御が行われます。つまり、モーターの位置や回転角度のフィードバック情報は利用されず、パルス信号に基づいて制御されます。そのため、比較的シンプルな制御回路で利用することができます。
高い応答性: ステッピングモーターは、パルス信号の変化に対して非常に迅速に応答します。パルス信号の周波数やパルス数を変化させることで、モーターの速度や回転方向を制御することができます。

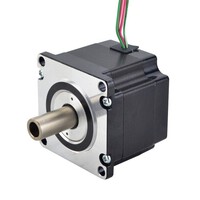
「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
静音な動作: ステッピングモーターは、回転がステップごとに分割されるため、一般的に静音な動作が特徴です。ノイズや振動が少なく、音響的な要件があるアプリケーションに適しています。
ステッピングモーターは、低コストで簡単に制御でき、位置制御が重要なアプリケーションに広く利用されています。ただし、高速回転や高い加速度を要求する場合や、位置のフィードバック制御が必要な場合には、他のモータータイプ(例:サーボモーター)が適している場合もあります。
ステップ角度: ステッピングモーターは、一定のステップ角度で回転します。例えば、1.8度ステッピングモーターでは、1ステップごとにモーターが1.8度回転します。この特性により、正確な位置制御が可能となります。
精密な位置制御: ステッピングモーターは、ステップ角度に基づいて位置を制御するため、高い位置制御精度が得られます。ステップ数によって位置が決まるため、目標位置までの移動や回転が非常に正確に行われます。

「写真の由来:Nema 23 防水クローズドループステッピングモーター Pシリーズ IP65 2Nm/283.28oz.1000CPRエンコーダ付き」
高トルク発生: ステッピングモーターは、パルス信号によってステップごとに回転します。この特性により、モーターは一定のトルクを発生し続けることができます。特に静止状態でのトルク発生能力が高く、負荷を保持することができます。
オープンループ制御: 通常、ステッピングモーターはオープンループ制御が行われます。つまり、モーターの位置や回転角度のフィードバック情報は利用されず、パルス信号に基づいて制御されます。そのため、比較的シンプルな制御回路で利用することができます。
高い応答性: ステッピングモーターは、パルス信号の変化に対して非常に迅速に応答します。パルス信号の周波数やパルス数を変化させることで、モーターの速度や回転方向を制御することができます。

「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
静音な動作: ステッピングモーターは、回転がステップごとに分割されるため、一般的に静音な動作が特徴です。ノイズや振動が少なく、音響的な要件があるアプリケーションに適しています。
ステッピングモーターは、低コストで簡単に制御でき、位置制御が重要なアプリケーションに広く利用されています。ただし、高速回転や高い加速度を要求する場合や、位置のフィードバック制御が必要な場合には、他のモータータイプ(例:サーボモーター)が適している場合もあります。
Posted by maa2ya8 at 11:50│Comments(0)