2024年05月20日
シャフトカップリングの性能要求
シャフトカップリングは、機械やシステムにおいて、複数の軸を接続し、トルクや回転を伝達する役割を果たす重要な部品です。以下に、一般的なシャフトカップリングの性能要求をいくつか挙げます。
1. トルク伝達能力: シャフトカップリングは、トルクを正確に伝達することが求められます。トルク伝達能力は、カップリングの材料や構造によって異なります。適切なトルク伝達能力を持つカップリングを選択することが重要です。
2. 軸の同心度: シャフトカップリングは、軸同士を正確に中心に合わせる必要があります。軸の同心度が高いほど、カップリングの性能や安定性が向上します。同心度の制約は、カップリングの設計や取り付け方法によって達成されます。

「写真の由来:8mm-8mm リジッドカップリング 25x30mm CNCステッピング モータシャフトカップリング」
3. 偏心および角度誤差の吸収: シャフトカップリングは、軸の偏心や角度誤差を吸収する能力が求められます。これにより、軸の微小なずれや変動があっても、カップリングは正確なトルク伝達を維持できます。
4. 振動吸収性: 機械システムでは、振動や衝撃が発生することがあります。シャフトカップリングは、振動や衝撃を吸収し、他の機械部品やシステムに伝達しないようにする必要があります。これにより、システムの安定性と信頼性が向上します。

「写真の由来:8mm-14mm フレキシブルジョーカップリング 30x40mm CNCステッピング モータシャフトカップリング」
5. 耐久性と耐摩耗性: シャフトカップリングは、長期間の使用に耐える必要があります。耐久性と耐摩耗性の高い材料やコーティングが使用されることがあります。また、適切なメンテナンスや定期的な点検も重要です。
6. 取り付けと交換の容易性: シャフトカップリングは、取り付けや交換が容易であることが望まれます。これにより、メンテナンスや修理の効率が向上し、システムの停止時間を最小限に抑えることができます。
これらの性能要求は、シャフトカップリングの特定のアプリケーションや使用環境に応じて異なる場合があります。適切なシャフトカップリングを選択するためには、設計要件やシステムの要求事項を考慮し、専門家のアドバイスを活用することが重要です。
1. トルク伝達能力: シャフトカップリングは、トルクを正確に伝達することが求められます。トルク伝達能力は、カップリングの材料や構造によって異なります。適切なトルク伝達能力を持つカップリングを選択することが重要です。
2. 軸の同心度: シャフトカップリングは、軸同士を正確に中心に合わせる必要があります。軸の同心度が高いほど、カップリングの性能や安定性が向上します。同心度の制約は、カップリングの設計や取り付け方法によって達成されます。

「写真の由来:8mm-8mm リジッドカップリング 25x30mm CNCステッピング モータシャフトカップリング」
3. 偏心および角度誤差の吸収: シャフトカップリングは、軸の偏心や角度誤差を吸収する能力が求められます。これにより、軸の微小なずれや変動があっても、カップリングは正確なトルク伝達を維持できます。
4. 振動吸収性: 機械システムでは、振動や衝撃が発生することがあります。シャフトカップリングは、振動や衝撃を吸収し、他の機械部品やシステムに伝達しないようにする必要があります。これにより、システムの安定性と信頼性が向上します。

「写真の由来:8mm-14mm フレキシブルジョーカップリング 30x40mm CNCステッピング モータシャフトカップリング」
5. 耐久性と耐摩耗性: シャフトカップリングは、長期間の使用に耐える必要があります。耐久性と耐摩耗性の高い材料やコーティングが使用されることがあります。また、適切なメンテナンスや定期的な点検も重要です。
6. 取り付けと交換の容易性: シャフトカップリングは、取り付けや交換が容易であることが望まれます。これにより、メンテナンスや修理の効率が向上し、システムの停止時間を最小限に抑えることができます。
これらの性能要求は、シャフトカップリングの特定のアプリケーションや使用環境に応じて異なる場合があります。適切なシャフトカップリングを選択するためには、設計要件やシステムの要求事項を考慮し、専門家のアドバイスを活用することが重要です。
Posted by maa2ya8 at
15:13
│Comments(0)
2024年05月11日
ステッピングモータエンコーダの役割とは?
ステッピングモータエンコーダは、ステッピングモータに取り付けられたセンサーです。主な役割は、モータの位置や動作の正確なフィードバックを提供することです。以下にステッピングモータエンコーダの主な役割を説明します。
位置検出とフィードバック制御: ステッピングモータエンコーダは、モータの回転角や位置を検出します。エンコーダは光学式、磁気式、またはホール効果センサーなどの技術を使用して、回転角度や位置情報をデジタル信号として出力します。これにより、モータの現在位置を正確に検出し、フィードバック制御を実現します。制御システムはエンコーダの情報を利用して、モータの位置を修正し、目標位置に精密に制御することができます。

「写真の由来:2000 CPR インクリメンタルロータリーエンコーダ ABZ 3チャンネル 8mm ソリッドシャフト ISC5208」
ステップロスの検出と訂正: ステッピングモータは、ステップ信号に基づいて回転するため、ステップロス(ステップが飛び飛びになること)が発生する場合があります。ステップロスは、負荷の変化やモータの不良などの要因によって引き起こされます。ステッピングモータエンコーダは、ステップロスの検出を行い、制御システムにその情報を提供します。これにより、正確な位置制御を維持するために必要なステップの補正が可能となります。

「写真の由来:1000 CPR 光学式ロータリーエンコーダー AB 2チャンネル ID 5mm HKT30 シールドケーブル付」
オーバーランの検出と保護: ステッピングモータは、モータの回転数に対して一定のトルクを提供します。しかし、負荷の増加や外部の抵抗により、モータがオーバーラン(回転速度が目標よりも高くなること)する場合があります。ステッピングモータエンコーダは、モータの回転速度を監視し、オーバーランが検出されると制御システムに通知します。これにより、モータやシステムの損傷を防ぐために適切な対策を取ることができます。
ステッピングモータエンコーダは、ステッピングモータの位置検出、フィードバック制御、ステップロスの検出と補正、オーバーランの検出と保護などの役割を果たします。これにより、ステッピングモータをより正確かつ信頼性の高い位置制御システムに組み込むことができます。
位置検出とフィードバック制御: ステッピングモータエンコーダは、モータの回転角や位置を検出します。エンコーダは光学式、磁気式、またはホール効果センサーなどの技術を使用して、回転角度や位置情報をデジタル信号として出力します。これにより、モータの現在位置を正確に検出し、フィードバック制御を実現します。制御システムはエンコーダの情報を利用して、モータの位置を修正し、目標位置に精密に制御することができます。

「写真の由来:2000 CPR インクリメンタルロータリーエンコーダ ABZ 3チャンネル 8mm ソリッドシャフト ISC5208」
ステップロスの検出と訂正: ステッピングモータは、ステップ信号に基づいて回転するため、ステップロス(ステップが飛び飛びになること)が発生する場合があります。ステップロスは、負荷の変化やモータの不良などの要因によって引き起こされます。ステッピングモータエンコーダは、ステップロスの検出を行い、制御システムにその情報を提供します。これにより、正確な位置制御を維持するために必要なステップの補正が可能となります。

「写真の由来:1000 CPR 光学式ロータリーエンコーダー AB 2チャンネル ID 5mm HKT30 シールドケーブル付」
オーバーランの検出と保護: ステッピングモータは、モータの回転数に対して一定のトルクを提供します。しかし、負荷の増加や外部の抵抗により、モータがオーバーラン(回転速度が目標よりも高くなること)する場合があります。ステッピングモータエンコーダは、モータの回転速度を監視し、オーバーランが検出されると制御システムに通知します。これにより、モータやシステムの損傷を防ぐために適切な対策を取ることができます。
ステッピングモータエンコーダは、ステッピングモータの位置検出、フィードバック制御、ステップロスの検出と補正、オーバーランの検出と保護などの役割を果たします。これにより、ステッピングモータをより正確かつ信頼性の高い位置制御システムに組み込むことができます。
Posted by maa2ya8 at
15:33
│Comments(0)
2024年04月30日
ギヤードモータの性能パラメータはその用途にどのような影響を与えるのでしょうか?
ギヤードモータの性能パラメータは、その用途に大きな影響を与えます。以下に、主な性能パラメータとその影響をいくつか説明します。
ギア比: ギヤードモータのギア比は、入力軸と出力軸の回転速度やトルクの比を示します。ギア比が高い場合、出力軸の回転速度は低くなりますが、出力トルクは増加します。逆に、ギア比が低い場合は、出力軸の回転速度は高くなりますが、出力トルクは低下します。ギア比は、モータの回転速度やトルク要求に応じて選択される必要があります。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=48mmとギヤ比 5:1 遊星ギアボックス」
トルク: ギヤードモータのトルクは、出力軸に加えられる回転力を示します。トルクの大きさは、ギアの種類やサイズ、モータの特性によって異なります。トルクは、モータが駆動する機械や装置の要求される負荷に応じて選択する必要があります。高いトルクが必要な場合は、適切なギアードモータを選択することが重要です。
効率: ギヤードモータの効率は、入力電力に対してどれだけの出力が得られるかを示します。効率の高いギヤードモータは、より少ない損失で効率的な動力変換が行われます。効率の高いモータは、エネルギー消費の最適化や熱の発生の削減に貢献します。

「写真の由来:Nema 23 ウォームギヤードモーター 23HS30-2804S-RV30-G5 L=76mm ギア比 5:1 NMRV30ウォームギアボックス付き」
サイズと重量: ギヤードモータのサイズと重量は、使用するアプリケーションや設置スペースに影響を与えます。小型で軽量のギヤードモータは、スペースが制約されている場所や軽量化が求められる設計に適しています。
耐久性と信頼性: ギヤードモータは、長時間の連続運転や負荷の変動に耐える必要があります。耐久性と信頼性は、モータの材料や製造品質、設計の堅牢性によって決まります。アプリケーションの要求に合わせて、適切な耐久性と信頼性を持つギヤードモータを選択することが重要です。
これらの性能パラメータは、ギヤードモータの選択と使用に大きな影響を与えます。アプリケーションの要求と目標に合わせて、適切な性能パラメータを考慮してギヤードモータを選択することが重要です。
ギア比: ギヤードモータのギア比は、入力軸と出力軸の回転速度やトルクの比を示します。ギア比が高い場合、出力軸の回転速度は低くなりますが、出力トルクは増加します。逆に、ギア比が低い場合は、出力軸の回転速度は高くなりますが、出力トルクは低下します。ギア比は、モータの回転速度やトルク要求に応じて選択される必要があります。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=48mmとギヤ比 5:1 遊星ギアボックス」
トルク: ギヤードモータのトルクは、出力軸に加えられる回転力を示します。トルクの大きさは、ギアの種類やサイズ、モータの特性によって異なります。トルクは、モータが駆動する機械や装置の要求される負荷に応じて選択する必要があります。高いトルクが必要な場合は、適切なギアードモータを選択することが重要です。
効率: ギヤードモータの効率は、入力電力に対してどれだけの出力が得られるかを示します。効率の高いギヤードモータは、より少ない損失で効率的な動力変換が行われます。効率の高いモータは、エネルギー消費の最適化や熱の発生の削減に貢献します。

「写真の由来:Nema 23 ウォームギヤードモーター 23HS30-2804S-RV30-G5 L=76mm ギア比 5:1 NMRV30ウォームギアボックス付き」
サイズと重量: ギヤードモータのサイズと重量は、使用するアプリケーションや設置スペースに影響を与えます。小型で軽量のギヤードモータは、スペースが制約されている場所や軽量化が求められる設計に適しています。
耐久性と信頼性: ギヤードモータは、長時間の連続運転や負荷の変動に耐える必要があります。耐久性と信頼性は、モータの材料や製造品質、設計の堅牢性によって決まります。アプリケーションの要求に合わせて、適切な耐久性と信頼性を持つギヤードモータを選択することが重要です。
これらの性能パラメータは、ギヤードモータの選択と使用に大きな影響を与えます。アプリケーションの要求と目標に合わせて、適切な性能パラメータを考慮してギヤードモータを選択することが重要です。
Posted by maa2ya8 at
15:37
│Comments(0)
2024年04月24日
ユニポーラステッピングモータとは何ですか?
ユニポーラステッピングモータ(Unipolar Stepper Motor)は、ステッピングモータの一種です。ユニポーラステッピングモータは、コイルを複数の独立したワインディング(巻線)に分割し、各ワインディングには中央タップと呼ばれる共通の接点があります。
ユニポーラステッピングモータは、通常、4つまたは5つの線(コネクタ)で接続されます。4線方式では、各ワインディングの両端に接続された4本の線があります。5線方式では、各ワインディングの両端と中央タップに接続された5本の線があります。

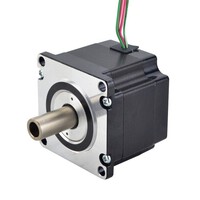
「写真の由来:Nema 17 ユニポーラステッピングモーター 1.8°32Ncm (45.3oz.in) 0.4A 12V 42x42x48mm 6 ワイヤー」
ユニポーラステッピングモータは、ステップパルス信号を使用して回転を制御します。ステップパルス信号は、各ワインディングに順番に流れる電流を切り替えることでモータを動かします。モータの回転方向は、ステップパルス信号の順序とワインディングの電流の流れ方によって制御されます。
ユニポーラステッピングモータの主な特徴は次のとおりです:
簡単な制御: ユニポーラステッピングモータは、比較的簡単な制御回路で動作させることができます。ステップパルス信号を生成し、各ワインディングの電流を切り替えることで、モータを正確に制御することができます。
低コスト: ユニポーラステッピングモータは、他のステッピングモータと比較して比較的低コストです。そのため、低予算のアプリケーションや初心者向けのプロジェクトに適しています。

「写真の由来:Nema 17 ユニポーラステッピングモータ 0.9°16Ncm (22.7oz.in) 0.3A 12V 42x42x34mm 6 ワイヤー」
低トルク: 一般的に、ユニポーラステッピングモータはバイポーラステッピングモータと比較してトルクが低い傾向があります。これは、ユニポーラステッピングモータが半分のワインディングしか使用しないためです。
低効率: ユニポーラステッピングモータは、効率が低いとされることがあります。これは、モータが電流を半分しか使用せず、電力ロスが増えるためです。
ユニポーラステッピングモータは、一般的に小型のアプリケーションや低負荷の動作に適しています。例えば、プリンター、スキャナー、ディスクドライブ、精密機器の移動部などで広く使用されます。
ユニポーラステッピングモータは、通常、4つまたは5つの線(コネクタ)で接続されます。4線方式では、各ワインディングの両端に接続された4本の線があります。5線方式では、各ワインディングの両端と中央タップに接続された5本の線があります。

「写真の由来:Nema 17 ユニポーラステッピングモーター 1.8°32Ncm (45.3oz.in) 0.4A 12V 42x42x48mm 6 ワイヤー」
ユニポーラステッピングモータは、ステップパルス信号を使用して回転を制御します。ステップパルス信号は、各ワインディングに順番に流れる電流を切り替えることでモータを動かします。モータの回転方向は、ステップパルス信号の順序とワインディングの電流の流れ方によって制御されます。
ユニポーラステッピングモータの主な特徴は次のとおりです:
簡単な制御: ユニポーラステッピングモータは、比較的簡単な制御回路で動作させることができます。ステップパルス信号を生成し、各ワインディングの電流を切り替えることで、モータを正確に制御することができます。
低コスト: ユニポーラステッピングモータは、他のステッピングモータと比較して比較的低コストです。そのため、低予算のアプリケーションや初心者向けのプロジェクトに適しています。

「写真の由来:Nema 17 ユニポーラステッピングモータ 0.9°16Ncm (22.7oz.in) 0.3A 12V 42x42x34mm 6 ワイヤー」
低トルク: 一般的に、ユニポーラステッピングモータはバイポーラステッピングモータと比較してトルクが低い傾向があります。これは、ユニポーラステッピングモータが半分のワインディングしか使用しないためです。
低効率: ユニポーラステッピングモータは、効率が低いとされることがあります。これは、モータが電流を半分しか使用せず、電力ロスが増えるためです。
ユニポーラステッピングモータは、一般的に小型のアプリケーションや低負荷の動作に適しています。例えば、プリンター、スキャナー、ディスクドライブ、精密機器の移動部などで広く使用されます。
Posted by maa2ya8 at
15:40
│Comments(0)
2024年04月16日
ステッピングモータエンコーダとは?何に使用できますか?
ステッピングモータエンコーダ(Stepper Motor Encoder)は、ステッピングモータに組み込まれたセンサーであり、モータの位置や回転数を正確に検出するためのデバイスです。ステッピングモータエンコーダは、以下のような目的で使用されます:
位置制御: ステッピングモータエンコーダは、モータの回転数や位置を検出することができます。これにより、モータの正確な位置制御が可能になります。特に、ステッピングモータは一般的にオープンループ制御なので、エンコーダ情報を使用することで、位置の精度を向上させることができます。

「写真の由来:1000 CPR 光学式ロータリーエンコーダー AB 2チャンネル ID 5mm HKT30 シールドケーブル付」
モーション制御: ステッピングモータエンコーダは、モータの回転速度や方向の変化を検出することができます。これにより、モーション制御アプリケーションにおいて、正確な速度プロファイルや加減速制御を実現することができます。
フィードバック制御: ステッピングモータエンコーダは、モータのフィードバック情報を提供します。これにより、制御システムは実際のモータの状態を把握し、必要に応じて調整することができます。フィードバック情報は、トルク制御や負荷変動時の応答性向上など、より高度な制御要件を満たすために使用されます。

「写真の由来:200 CPR インクリメンタルステッピングモータロータリーエンコーダ AB 2チャンネル 4mm ソリッドシャフト ISC3004」
ステッピングモータエンコーダは、産業自動化、ロボット工学、医療機器、印刷機、CNCマシン、プリンター、3Dプリンティングなどのさまざまな応用分野で使用されます。特に、位置制御とモーション制御が重要なアプリケーションにおいて、ステッピングモータエンコーダは高い精度と信頼性を提供します。
位置制御: ステッピングモータエンコーダは、モータの回転数や位置を検出することができます。これにより、モータの正確な位置制御が可能になります。特に、ステッピングモータは一般的にオープンループ制御なので、エンコーダ情報を使用することで、位置の精度を向上させることができます。

「写真の由来:1000 CPR 光学式ロータリーエンコーダー AB 2チャンネル ID 5mm HKT30 シールドケーブル付」
モーション制御: ステッピングモータエンコーダは、モータの回転速度や方向の変化を検出することができます。これにより、モーション制御アプリケーションにおいて、正確な速度プロファイルや加減速制御を実現することができます。
フィードバック制御: ステッピングモータエンコーダは、モータのフィードバック情報を提供します。これにより、制御システムは実際のモータの状態を把握し、必要に応じて調整することができます。フィードバック情報は、トルク制御や負荷変動時の応答性向上など、より高度な制御要件を満たすために使用されます。

「写真の由来:200 CPR インクリメンタルステッピングモータロータリーエンコーダ AB 2チャンネル 4mm ソリッドシャフト ISC3004」
ステッピングモータエンコーダは、産業自動化、ロボット工学、医療機器、印刷機、CNCマシン、プリンター、3Dプリンティングなどのさまざまな応用分野で使用されます。特に、位置制御とモーション制御が重要なアプリケーションにおいて、ステッピングモータエンコーダは高い精度と信頼性を提供します。
Posted by maa2ya8 at
16:06
│Comments(0)
2024年04月10日
cncインバーターの異常電流はどうなっているのでしょうか?
CNCインバーターの異常電流は、通常、以下のような状況で発生する可能性があります。
過電流(Overcurrent): インバーターが制御しているモーターに異常な電流が流れる場合、過電流が発生します。過電流は、モーターの負荷が異常に高い場合や、モーターの内部故障(ショートや絶縁の問題)が原因で発生することがあります。

「写真の由来:BD600シリーズ VFD可変周波数ドライブインバーター BD600-7R5G-011P-4 10HP/15HP 7.5/11KW 18/24A 三相 380V」
短絡(Short Circuit): モーターの巻線や配線に短絡が発生した場合、インバーターは異常な電流を検知します。短絡は、配線の断線や絶縁の劣化、モーターの内部故障などが原因となります。
過熱(Overheating): モーターやインバーターの部品が過熱すると、電流の増加やパフォーマンスの低下が発生することがあります。過熱によって電流が異常なレベルに上昇する場合、インバーターは異常電流を検知します。

「写真の由来:H100シリーズ VFD可変周波数ドライブインバーター H100T20037BX0 5HP 3.7KW 15.2A 単相/三相 220V」
これらの異常電流が検知されると、CNCインバーターは通常、保護機能を備えており、過電流や短絡などの問題を検出すると電源を遮断するなどの対策を取ります。これにより、モーターやインバーターへの損傷や事故を防止することができます。
CNCインバーターの異常電流の具体的な動作や保護機能は、製品の仕様や設計によって異なる場合があります。インバーターのマニュアルや技術仕様書を参照することで、詳細な情報を確認することができます。
過電流(Overcurrent): インバーターが制御しているモーターに異常な電流が流れる場合、過電流が発生します。過電流は、モーターの負荷が異常に高い場合や、モーターの内部故障(ショートや絶縁の問題)が原因で発生することがあります。

「写真の由来:BD600シリーズ VFD可変周波数ドライブインバーター BD600-7R5G-011P-4 10HP/15HP 7.5/11KW 18/24A 三相 380V」
短絡(Short Circuit): モーターの巻線や配線に短絡が発生した場合、インバーターは異常な電流を検知します。短絡は、配線の断線や絶縁の劣化、モーターの内部故障などが原因となります。
過熱(Overheating): モーターやインバーターの部品が過熱すると、電流の増加やパフォーマンスの低下が発生することがあります。過熱によって電流が異常なレベルに上昇する場合、インバーターは異常電流を検知します。

「写真の由来:H100シリーズ VFD可変周波数ドライブインバーター H100T20037BX0 5HP 3.7KW 15.2A 単相/三相 220V」
これらの異常電流が検知されると、CNCインバーターは通常、保護機能を備えており、過電流や短絡などの問題を検出すると電源を遮断するなどの対策を取ります。これにより、モーターやインバーターへの損傷や事故を防止することができます。
CNCインバーターの異常電流の具体的な動作や保護機能は、製品の仕様や設計によって異なる場合があります。インバーターのマニュアルや技術仕様書を参照することで、詳細な情報を確認することができます。
Posted by maa2ya8 at
15:35
│Comments(0)
2024年04月01日
ステッピングモータエンコーダに何に使用されますか?
ステッピングモータエンコーダは、ステッピングモータの位置検出や制御に使用されます。以下に、ステッピングモータエンコーダの主な用途をいくつか紹介します:
位置検出: ステッピングモータエンコーダは、モータの回転角度や位置を検出するために使用されます。エンコーダは、モータの回転数やステップ数を正確に計測し、その情報を制御システムにフィードバックします。これにより、モータの現在位置を把握することができます。

「写真の由来:2000 CPR インクリメンタルロータリーエンコーダ ABZ 3チャンネル 8mm ソリッドシャフト ISC5208」
位置制御: ステッピングモータエンコーダは、位置制御において重要な役割を果たします。エンコーダがモータの位置を検出し、それを制御システムにフィードバックすることで、正確な位置制御が可能になります。位置情報に基づいて制御信号を調整することで、目標位置にモータを正確に移動させることができます。
ステップ監視とフィードバック: ステッピングモータエンコーダは、ステップの損失やモータのスキップを監視するために使用されます。エンコーダは、各ステップの位置を検出し、正確なステップの実行を確認します。ステップの損失やスキップが検出された場合、制御システムはこれに対応するために調整を行います。

「写真の由来:1000 CPR 光学式ロータリーエンコーダー AB 2チャンネル ID 5mm HKT30 シールドケーブル付」
モータの安全性と信頼性: ステッピングモータエンコーダは、モータの運転中に異常が発生した場合にも使用されます。エンコーダは、回転や位置に関する情報を提供することで、異常検知や安全機能の実装に役立ちます。例えば、モータの回転が予期しない速度で変化した場合や、位置が正確でない場合に、エンコーダはこれを検出し、制御システムに警告を送ることができます。
ステッピングモータエンコーダは、ステッピングモータの正確な位置検出や制御に不可欠な装置です。これにより、高精度な位置制御や安全性の向上が実現されます。
位置検出: ステッピングモータエンコーダは、モータの回転角度や位置を検出するために使用されます。エンコーダは、モータの回転数やステップ数を正確に計測し、その情報を制御システムにフィードバックします。これにより、モータの現在位置を把握することができます。

「写真の由来:2000 CPR インクリメンタルロータリーエンコーダ ABZ 3チャンネル 8mm ソリッドシャフト ISC5208」
位置制御: ステッピングモータエンコーダは、位置制御において重要な役割を果たします。エンコーダがモータの位置を検出し、それを制御システムにフィードバックすることで、正確な位置制御が可能になります。位置情報に基づいて制御信号を調整することで、目標位置にモータを正確に移動させることができます。
ステップ監視とフィードバック: ステッピングモータエンコーダは、ステップの損失やモータのスキップを監視するために使用されます。エンコーダは、各ステップの位置を検出し、正確なステップの実行を確認します。ステップの損失やスキップが検出された場合、制御システムはこれに対応するために調整を行います。

「写真の由来:1000 CPR 光学式ロータリーエンコーダー AB 2チャンネル ID 5mm HKT30 シールドケーブル付」
モータの安全性と信頼性: ステッピングモータエンコーダは、モータの運転中に異常が発生した場合にも使用されます。エンコーダは、回転や位置に関する情報を提供することで、異常検知や安全機能の実装に役立ちます。例えば、モータの回転が予期しない速度で変化した場合や、位置が正確でない場合に、エンコーダはこれを検出し、制御システムに警告を送ることができます。
ステッピングモータエンコーダは、ステッピングモータの正確な位置検出や制御に不可欠な装置です。これにより、高精度な位置制御や安全性の向上が実現されます。
Posted by maa2ya8 at
15:43
│Comments(0)
2024年03月26日
ステッピングモーターの制御アルゴリズム
ステッピングモーターの制御にはさまざまなアルゴリズムがありますが、以下に代表的な2つのアルゴリズムを説明します:
パルス列制御 (Pulse Train Control):
パルス列制御は、最も基本的なステッピングモーターの制御方法です。このアルゴリズムでは、ステッピングモーターにパルス信号を送り、モーターを一定の角度だけステップ回転させます。パルスの周波数やパルス数によって回転速度や回転量を制御します。パルス列制御は比較的シンプルで実装が容易ですが、高速回転や高い位置制御精度が求められる場合には適していません。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
マイクロステップ制御 (Microstepping Control):
マイクロステップ制御は、ステッピングモーターの制御精度を向上させるために開発されたアルゴリズムです。この方法では、パルス信号をより細かいステップに分割し、ステッピングモーターをより滑らかに制御します。具体的には、パルス信号をパルス幅変調 (PWM) によって調整し、モーターの電流を制御することで微小なステップを実現します。マイクロステップ制御はより高い位置制御精度と滑らかなモーター運動を実現できますが、制御回路の複雑さやコストが増すことがあります。

「写真の由来:Nema 23 一体型ステッピングモータ ドライバ付 190 Ncm(269oz.in) ISD04 12-38VDC」
これらのアルゴリズムは、ステッピングモーターの特性や制御要件に応じて選択されます。また、位置検出やモーションプロファイルの考慮、加速・減速制御など、より高度な制御機能を実現するために他のアルゴリズムや制御テクニックが組み合わされることもあります。
パルス列制御 (Pulse Train Control):
パルス列制御は、最も基本的なステッピングモーターの制御方法です。このアルゴリズムでは、ステッピングモーターにパルス信号を送り、モーターを一定の角度だけステップ回転させます。パルスの周波数やパルス数によって回転速度や回転量を制御します。パルス列制御は比較的シンプルで実装が容易ですが、高速回転や高い位置制御精度が求められる場合には適していません。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
マイクロステップ制御 (Microstepping Control):
マイクロステップ制御は、ステッピングモーターの制御精度を向上させるために開発されたアルゴリズムです。この方法では、パルス信号をより細かいステップに分割し、ステッピングモーターをより滑らかに制御します。具体的には、パルス信号をパルス幅変調 (PWM) によって調整し、モーターの電流を制御することで微小なステップを実現します。マイクロステップ制御はより高い位置制御精度と滑らかなモーター運動を実現できますが、制御回路の複雑さやコストが増すことがあります。

「写真の由来:Nema 23 一体型ステッピングモータ ドライバ付 190 Ncm(269oz.in) ISD04 12-38VDC」
これらのアルゴリズムは、ステッピングモーターの特性や制御要件に応じて選択されます。また、位置検出やモーションプロファイルの考慮、加速・減速制御など、より高度な制御機能を実現するために他のアルゴリズムや制御テクニックが組み合わされることもあります。
Posted by maa2ya8 at
15:41
│Comments(0)
2024年03月18日
リニアステッピングモータの駆動と制御
リニアステッピングモータ(Linear Stepper Motor)の駆動と制御について説明します。
駆動方法:
リニアステッピングモータは、ステップモータと同様にパルス信号を使用して駆動します。モーターにパルス信号を送ることで、モーターがステップごとに一定の距離を移動します。リニアステッピングモータは、ローターとステーターの間に磁石が配置されており、電流を流すことで磁場を生成し、モーターを駆動します。
制御方法:
リニアステッピングモータを制御するためには、以下の手順を実行する必要があります。
a. パルスジェネレータ: パルスジェネレータは、モーターに対してパルス信号を生成するための装置です。パルスジェネレータは、指定された速度や移動距離に基づいてパルス信号を生成します。
b. ドライバ回路: パルスジェネレータから生成されたパルス信号は、ドライバ回路に送られます。ドライバ回路は、パルス信号を電流に変換し、モーターに供給します。ドライバ回路はまた、パルス信号の方向を制御するための制御信号も受け取ります。

「写真の由来:Nema 17 エクスターナルリニアステッピングモータ (バックラッシ防止ねじナット付)」
c. 制御信号: 制御信号は、モーターを制御するための追加の信号です。これには、ホームセンサーからの信号やリミットスイッチからの信号などが含まれます。制御信号は、モーターの位置検出や制限を管理するために使用されます。
制御手法:
リニアステッピングモータの制御には、いくつかの手法があります。
a. オープンループ制御: オープンループ制御では、パルス信号の数と順序を制御してモーターを駆動します。ただし、この方法ではモーターの位置や速度のフィードバックを得ることができず、位置の正確性や制御の安定性に制限があります。

「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504SC5-150RS 0.02Nm ねじリード 1mm(0.03937") 長さ 150mm」
b. クローズドループ制御: クローズドループ制御では、エンコーダやホール効果センサなどのフィードバックデバイスを使用して、モーターの位置や速度を計測します。これにより、より正確な位置制御や速度制御が可能となります。
c. ステップダイレクション制御: ステップダイレクション制御では、パルス信号の数と方向を制御してモーターを駆動します。この制御方法は、単純で使いやすく、多くのアプリケーションで広く使用されています。
リニアステッピングモータの駆動と制御は、モーターの設計やアプリケーションによって異なる場合があります。モーターのメーカーの指示に従い、適切な駆動回路や制御手法を選択することが重要です。
駆動方法:
リニアステッピングモータは、ステップモータと同様にパルス信号を使用して駆動します。モーターにパルス信号を送ることで、モーターがステップごとに一定の距離を移動します。リニアステッピングモータは、ローターとステーターの間に磁石が配置されており、電流を流すことで磁場を生成し、モーターを駆動します。
制御方法:
リニアステッピングモータを制御するためには、以下の手順を実行する必要があります。
a. パルスジェネレータ: パルスジェネレータは、モーターに対してパルス信号を生成するための装置です。パルスジェネレータは、指定された速度や移動距離に基づいてパルス信号を生成します。
b. ドライバ回路: パルスジェネレータから生成されたパルス信号は、ドライバ回路に送られます。ドライバ回路は、パルス信号を電流に変換し、モーターに供給します。ドライバ回路はまた、パルス信号の方向を制御するための制御信号も受け取ります。

「写真の由来:Nema 17 エクスターナルリニアステッピングモータ (バックラッシ防止ねじナット付)」
c. 制御信号: 制御信号は、モーターを制御するための追加の信号です。これには、ホームセンサーからの信号やリミットスイッチからの信号などが含まれます。制御信号は、モーターの位置検出や制限を管理するために使用されます。
制御手法:
リニアステッピングモータの制御には、いくつかの手法があります。
a. オープンループ制御: オープンループ制御では、パルス信号の数と順序を制御してモーターを駆動します。ただし、この方法ではモーターの位置や速度のフィードバックを得ることができず、位置の正確性や制御の安定性に制限があります。

「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504SC5-150RS 0.02Nm ねじリード 1mm(0.03937") 長さ 150mm」
b. クローズドループ制御: クローズドループ制御では、エンコーダやホール効果センサなどのフィードバックデバイスを使用して、モーターの位置や速度を計測します。これにより、より正確な位置制御や速度制御が可能となります。
c. ステップダイレクション制御: ステップダイレクション制御では、パルス信号の数と方向を制御してモーターを駆動します。この制御方法は、単純で使いやすく、多くのアプリケーションで広く使用されています。
リニアステッピングモータの駆動と制御は、モーターの設計やアプリケーションによって異なる場合があります。モーターのメーカーの指示に従い、適切な駆動回路や制御手法を選択することが重要です。
Posted by maa2ya8 at
16:37
│Comments(0)
2024年03月11日
ブラシレスDCモータの性能評価基準
ブラシレスDCモータの性能評価には、以下のような基準が一般的に使用されます。
効率性: ブラシレスDCモータの効率性は、入力電力に対してどれだけの出力が得られるかを評価します。高い効率性は、電力の節約やエネルギー効率の向上につながります。

「写真の由来:36V 4000RPM 0.33Nm 138W 5.0A Ф57x89mm ブラシレスDCモータ(BLDC)」
トルクと回転数: モータの出力トルクと回転数は、モータの性能を評価する重要な要素です。高いトルクは、負荷のある応用でのパフォーマンス向上に寄与します。また、広い範囲で制御可能な回転数範囲も望ましい特性です。
応答性と制御特性: ブラシレスDCモータは、高い応答性と正確な制御特性が求められます。応答性は、モータが指示に対してどれだけ迅速かつ正確に反応するかを表します。制御特性は、速度制御や位置制御などの制御手法において、モータが要求に応じて正確な動作をする能力を示します。

「写真の由来:24V 4000RPM 0.125Nm 52.5W 3.4A 42x42x60mm ブラシレスDCモータ(BLDC)」
騒音と振動: ブラシレスDCモータの騒音と振動は、特に要求の厳しい応用では重要な要素です。低騒音で低振動のモータは、快適性や環境への影響を軽減することができます。
耐久性と信頼性: 長期にわたって安定したパフォーマンスを維持するためには、ブラシレスDCモータの耐久性と信頼性が重要です。耐久性は、モータが長時間の連続運転や負荷変動に耐える能力を示します。信頼性は、モータの故障や不具合の発生頻度を評価します。
これらの基準を使用して、ブラシレスDCモータの性能を評価することが一般的です。具体的なアプリケーションや要件に応じて、これらの基準の重要性や評価方法は異なる場合があります。
効率性: ブラシレスDCモータの効率性は、入力電力に対してどれだけの出力が得られるかを評価します。高い効率性は、電力の節約やエネルギー効率の向上につながります。

「写真の由来:36V 4000RPM 0.33Nm 138W 5.0A Ф57x89mm ブラシレスDCモータ(BLDC)」
トルクと回転数: モータの出力トルクと回転数は、モータの性能を評価する重要な要素です。高いトルクは、負荷のある応用でのパフォーマンス向上に寄与します。また、広い範囲で制御可能な回転数範囲も望ましい特性です。
応答性と制御特性: ブラシレスDCモータは、高い応答性と正確な制御特性が求められます。応答性は、モータが指示に対してどれだけ迅速かつ正確に反応するかを表します。制御特性は、速度制御や位置制御などの制御手法において、モータが要求に応じて正確な動作をする能力を示します。

「写真の由来:24V 4000RPM 0.125Nm 52.5W 3.4A 42x42x60mm ブラシレスDCモータ(BLDC)」
騒音と振動: ブラシレスDCモータの騒音と振動は、特に要求の厳しい応用では重要な要素です。低騒音で低振動のモータは、快適性や環境への影響を軽減することができます。
耐久性と信頼性: 長期にわたって安定したパフォーマンスを維持するためには、ブラシレスDCモータの耐久性と信頼性が重要です。耐久性は、モータが長時間の連続運転や負荷変動に耐える能力を示します。信頼性は、モータの故障や不具合の発生頻度を評価します。
これらの基準を使用して、ブラシレスDCモータの性能を評価することが一般的です。具体的なアプリケーションや要件に応じて、これらの基準の重要性や評価方法は異なる場合があります。
Posted by maa2ya8 at
16:08
│Comments(0)