2025年05月22日
産業用ロボットに最適なBLDCモーターの選び方
産業用ロボットに最適なブラシレスDCモーター(BLDCモーター)を選ぶ際には、いくつかの重要な要素を考慮する必要があります。以下に、産業用ロボットに適したBLDCモーターを選ぶ際のポイントをいくつか示します。
産業用ロボットに最適なBLDCモーターの選び方:
1. トルク要件:
- ロボットが必要とするトルクや動力を正確に評価し、それに適したトルク特性を持つBLDCモーターを選択します。運動負荷や加速度などの要件を考慮して適切なトルクを選定します。

「写真の由来:2個 Φ22.4mm 12V/24V BLDC モーター ブラシレス dc モーター TEC2430 4500RPM 3W 0.05kg.cm 軸径 2mm」
2. 速度要件:
- ロボットの動作速度や応答性に合わせて、BLDCモーターの回転速度範囲を考慮します。高速かつスムーズな動作が必要な場合には、高速域でのトルク特性を重視します。
3. サイズと重量:
- ロボットの設計に合わせて適切なサイズと重量のBLDCモーターを選択します。モーターのコンパクトさや軽量性が重要な場合には、これらの要素を考慮します。
4. 効率性:
- 高い効率性を持つBLDCモーターを選択することで、エネルギー消費を最適化し、運転コストを削減できます。効率性は長時間運転が必要な産業用途において重要です。
5. 制御方式:
- BLDCモーターの制御方式(センサーレス、ホールセンサー付き、エンコーダー付きなど)を選択します。特定の制御方式がロボットの動作制御に適しているかを検討します。

「写真の由来:36V 4300RPM 0.22Nm 99W 4.2A Ф57x69mm ブラシレスDCモータ(BLDC)」
6. 信頼性と耐久性:
- 産業環境での使用に耐える高い信頼性と耐久性が求められます。過酷な環境下での動作や長時間の連続運転にも耐えられるモーターを選択します。
7. ブランドとサポート:
- 品質の高い製品と信頼性のあるメーカーからの製品を選択し、製品サポートやアフターサービスの充実度も考慮します。
産業用ロボットに適したBLDCモーターを選ぶ際には、上記の要素を考慮し、ロボットの要件や環境に適したモーターを選定することが重要です。適切なBLDCモーターの選択は、ロボットの性能向上や安定した動作につながります。
産業用ロボットに最適なBLDCモーターの選び方:
1. トルク要件:
- ロボットが必要とするトルクや動力を正確に評価し、それに適したトルク特性を持つBLDCモーターを選択します。運動負荷や加速度などの要件を考慮して適切なトルクを選定します。

「写真の由来:2個 Φ22.4mm 12V/24V BLDC モーター ブラシレス dc モーター TEC2430 4500RPM 3W 0.05kg.cm 軸径 2mm」
2. 速度要件:
- ロボットの動作速度や応答性に合わせて、BLDCモーターの回転速度範囲を考慮します。高速かつスムーズな動作が必要な場合には、高速域でのトルク特性を重視します。
3. サイズと重量:
- ロボットの設計に合わせて適切なサイズと重量のBLDCモーターを選択します。モーターのコンパクトさや軽量性が重要な場合には、これらの要素を考慮します。
4. 効率性:
- 高い効率性を持つBLDCモーターを選択することで、エネルギー消費を最適化し、運転コストを削減できます。効率性は長時間運転が必要な産業用途において重要です。
5. 制御方式:
- BLDCモーターの制御方式(センサーレス、ホールセンサー付き、エンコーダー付きなど)を選択します。特定の制御方式がロボットの動作制御に適しているかを検討します。

「写真の由来:36V 4300RPM 0.22Nm 99W 4.2A Ф57x69mm ブラシレスDCモータ(BLDC)」
6. 信頼性と耐久性:
- 産業環境での使用に耐える高い信頼性と耐久性が求められます。過酷な環境下での動作や長時間の連続運転にも耐えられるモーターを選択します。
7. ブランドとサポート:
- 品質の高い製品と信頼性のあるメーカーからの製品を選択し、製品サポートやアフターサービスの充実度も考慮します。
産業用ロボットに適したBLDCモーターを選ぶ際には、上記の要素を考慮し、ロボットの要件や環境に適したモーターを選定することが重要です。適切なBLDCモーターの選択は、ロボットの性能向上や安定した動作につながります。
Posted by maa2ya8 at
15:45
│Comments(0)
2025年05月14日
バイポーラステッピングモータのトルク特性と選定ポイント
バイポーラステッピングモーターは、ステッピングモーターの一種であり、トルク特性と選定ポイントについて以下にまとめます。
トルク特性:
1. 静的トルク:
- バイポーラステッピングモーターは、停止状態で印可されるトルクを指します。このトルクは、モーターが停止した状態で物体を固定するために必要なトルクです。

「写真の由来:Nema 17 バイポーラステッピングモーター 1.8°44Ncm (62.3oz.in) 0.85A 5.3V 42x42x48mm 4 ワイヤー」
2. 動的トルク:
- バイポーラステッピングモーターは、回転中に発生するトルクも重要です。このトルクは、モーターが運転中に物体を動かす際に必要なトルクを示します。
3. トルク曲線:
- バイポーラステッピングモーターのトルク特性は、ステップ数や回転速度によって変化します。通常、低速域では高いトルクを発揮し、高速域ではトルクが低下する特性があります。
選定ポイント:
1. 必要なトルクレンジ:
- 必要な負荷に対して適切なトルクを提供できるモーターを選定します。運用環境や応用に応じて、適切なトルクレンジを選択することが重要です。
2. ステップ角:
- バイポーラステッピングモーターのステップ角(1ステップあたりの角度)が、正確な位置決めや運動制御に影響を与えます。適切なステップ角を選定します。

「写真の由来:Nema 16 バイポーラステッピングモーター 1.8°8.7Ncm (12.3oz.in) 0.6A 3.96V 39x39x20mm 4 ワイヤー」
3. 回転速度要件:
- 必要な回転速度に対応できるモーターを選定します。高速回転が必要な場合は、それに対応できるモーターを選択する必要があります。
4. 制御方式:
- バイポーラステッピングモーターは、適切なドライバーと組み合わせて制御する必要があります。選定する際には、適切な制御方式を考慮します。
5. 機械構造に適合:
- モーターのサイズや形状が、搭載する機械構造に適合しているかを確認し、適切なモーターを選定します。
バイポーラステッピングモーターの選定には、必要なトルクや回転速度、制御方式などの要件を適切に考慮することが重要です。適切なモーターを選定することで、システムの性能や効率を最適化することができます。
トルク特性:
1. 静的トルク:
- バイポーラステッピングモーターは、停止状態で印可されるトルクを指します。このトルクは、モーターが停止した状態で物体を固定するために必要なトルクです。

「写真の由来:Nema 17 バイポーラステッピングモーター 1.8°44Ncm (62.3oz.in) 0.85A 5.3V 42x42x48mm 4 ワイヤー」
2. 動的トルク:
- バイポーラステッピングモーターは、回転中に発生するトルクも重要です。このトルクは、モーターが運転中に物体を動かす際に必要なトルクを示します。
3. トルク曲線:
- バイポーラステッピングモーターのトルク特性は、ステップ数や回転速度によって変化します。通常、低速域では高いトルクを発揮し、高速域ではトルクが低下する特性があります。
選定ポイント:
1. 必要なトルクレンジ:
- 必要な負荷に対して適切なトルクを提供できるモーターを選定します。運用環境や応用に応じて、適切なトルクレンジを選択することが重要です。
2. ステップ角:
- バイポーラステッピングモーターのステップ角(1ステップあたりの角度)が、正確な位置決めや運動制御に影響を与えます。適切なステップ角を選定します。

「写真の由来:Nema 16 バイポーラステッピングモーター 1.8°8.7Ncm (12.3oz.in) 0.6A 3.96V 39x39x20mm 4 ワイヤー」
3. 回転速度要件:
- 必要な回転速度に対応できるモーターを選定します。高速回転が必要な場合は、それに対応できるモーターを選択する必要があります。
4. 制御方式:
- バイポーラステッピングモーターは、適切なドライバーと組み合わせて制御する必要があります。選定する際には、適切な制御方式を考慮します。
5. 機械構造に適合:
- モーターのサイズや形状が、搭載する機械構造に適合しているかを確認し、適切なモーターを選定します。
バイポーラステッピングモーターの選定には、必要なトルクや回転速度、制御方式などの要件を適切に考慮することが重要です。適切なモーターを選定することで、システムの性能や効率を最適化することができます。
Posted by maa2ya8 at
16:08
│Comments(0)
2025年05月08日
CNC加工・工作機械に不可欠!スピンドルモーターの基礎知識
スピンドルモーターは、CNC(コンピュータ数値制御)加工機や工作機械などで主軸として使用されるモーターであり、高速で精密な回転を提供する重要な部品です。以下に、スピンドルモーターの基礎知識を紹介します:
スピンドルモーターの基礎知識:
1. 主軸回転:
- スピンドルモーターは、工作物やツールを取り付ける主軸を回転させるために使用されます。高速で精密な回転を実現し、CNC加工や工作機械の動作を支えます。
2. 高速回転:
- スピンドルモーターは高速回転が可能であり、加工速度や精度に影響を与えます。高速かつ安定した回転が必要な加工作業に適しています。

「写真の由来:CNC空冷スピンドルモーター220V 2.2KW 8A 24000RPM 400Hz ER20コレット CNCインバータ(VFD)モーター」
3. 冷却:
- 高速回転するスピンドルモーターは発熱が激しいため、冷却が重要です。冷却システムや冷却液を使用して、温度を適切に管理します。
4. 精度と剛性:
- スピンドルモーターの精度と剛性は、加工の品質に直接影響します。高い剛性を持つスピンドルモーターは、振動や歪みを最小限に抑え、精密な加工を可能にします。
5. ツールチェンジャーとの連携:
- CNC加工機では、複数の工具を自動的に交換するツールチェンジャーとスピンドルモーターを連携させることで、生産性を向上させます。

「写真の由来:CNCスクエアスピンドルモータ空冷 380V 4.5KW 18000RPM 300Hz ER32コレット」
6. トルクと回転数:
- スピンドルモーターのトルクと回転数は、加工材料や工具によって適切に調整する必要があります。適切なトルクと回転数の組み合わせが重要です。
7. 保守とメンテナンス:
- 定期的な点検、メンテナンス、および適切な保守がスピンドルモーターの寿命と性能維持に重要です。
スピンドルモーターはCNC加工や工作機械において重要な役割を果たす部品であり、適切な選定と運用によって生産性や加工精度を向上させることができます。
スピンドルモーターの基礎知識:
1. 主軸回転:
- スピンドルモーターは、工作物やツールを取り付ける主軸を回転させるために使用されます。高速で精密な回転を実現し、CNC加工や工作機械の動作を支えます。
2. 高速回転:
- スピンドルモーターは高速回転が可能であり、加工速度や精度に影響を与えます。高速かつ安定した回転が必要な加工作業に適しています。

「写真の由来:CNC空冷スピンドルモーター220V 2.2KW 8A 24000RPM 400Hz ER20コレット CNCインバータ(VFD)モーター」
3. 冷却:
- 高速回転するスピンドルモーターは発熱が激しいため、冷却が重要です。冷却システムや冷却液を使用して、温度を適切に管理します。
4. 精度と剛性:
- スピンドルモーターの精度と剛性は、加工の品質に直接影響します。高い剛性を持つスピンドルモーターは、振動や歪みを最小限に抑え、精密な加工を可能にします。
5. ツールチェンジャーとの連携:
- CNC加工機では、複数の工具を自動的に交換するツールチェンジャーとスピンドルモーターを連携させることで、生産性を向上させます。

「写真の由来:CNCスクエアスピンドルモータ空冷 380V 4.5KW 18000RPM 300Hz ER32コレット」
6. トルクと回転数:
- スピンドルモーターのトルクと回転数は、加工材料や工具によって適切に調整する必要があります。適切なトルクと回転数の組み合わせが重要です。
7. 保守とメンテナンス:
- 定期的な点検、メンテナンス、および適切な保守がスピンドルモーターの寿命と性能維持に重要です。
スピンドルモーターはCNC加工や工作機械において重要な役割を果たす部品であり、適切な選定と運用によって生産性や加工精度を向上させることができます。
Posted by maa2ya8 at
16:06
│Comments(0)
2025年04月28日
ACサーボモーターが故障したときの対応方法について
ACサーボモーターが故障した場合、以下は一般的な対応方法です。ただし、ACサーボモーターの構造や製造元によって異なるため、製造元の指示やマニュアルに従うことが最も重要です。
ACサーボモーターの故障時の対応方法:
1. 故障の原因を特定:
- ACサーボモーターが故障した場合、まず原因を特定するために適切な診断を行います。電気系統、機械部品、コントローラーなどの可能性があります。

「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
2. 製造元への問い合わせ:
- ACサーボモーターの製造元に連絡し、故障状況を説明し、修理や交換に関する指示を受けます。製造元のサポートを受けることで、正確な対応が可能となります。
3. 交換可能な部品の確認:
- ACサーボモーターの故障が特定された場合、交換が可能な部品(例: センサー、ベアリングなど)があれば、それらを交換することで修理を試みることができます。

「写真の由来:T6シリーズ 1000W デジタル AC サーボモーター & ドライバー キット 3.19Nm (ブレーキ 、17 ビット エンコーダー付き )」
4. 適切な交換部品の手配:
- 必要な部品を手配し、修理作業を行うための準備を整えます。正確な部品番号や仕様を確認し、適切な部品を取り揃えます。
5. 修理作業の実施:
- 適切な手順と注意を払いながら、故障した部品の交換や修理作業を実施します。製造元のマニュアルやガイドラインに従い、作業を行います。
6. テストと調整:
- 修理作業が完了した後、ACサーボモーターをテストし、正常に動作するかどうかを確認します。必要に応じて調整を行い、動作を安定させます。
7. 予防的なメンテナンス:
- ACサーボモーターの故障を防ぐために、定期的なメンテナンスや点検を行うことが重要です。故障の原因を特定し、再発を防ぐための対策を講じます。
ACサーボモーターの故障時には、確実な診断と適切な対応が重要です。製造元や専門家のアドバイスを受けながら、迅速かつ正確な修理を行うことが重要です。
ACサーボモーターの故障時の対応方法:
1. 故障の原因を特定:
- ACサーボモーターが故障した場合、まず原因を特定するために適切な診断を行います。電気系統、機械部品、コントローラーなどの可能性があります。

「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
2. 製造元への問い合わせ:
- ACサーボモーターの製造元に連絡し、故障状況を説明し、修理や交換に関する指示を受けます。製造元のサポートを受けることで、正確な対応が可能となります。
3. 交換可能な部品の確認:
- ACサーボモーターの故障が特定された場合、交換が可能な部品(例: センサー、ベアリングなど)があれば、それらを交換することで修理を試みることができます。

「写真の由来:T6シリーズ 1000W デジタル AC サーボモーター & ドライバー キット 3.19Nm (ブレーキ 、17 ビット エンコーダー付き )」
4. 適切な交換部品の手配:
- 必要な部品を手配し、修理作業を行うための準備を整えます。正確な部品番号や仕様を確認し、適切な部品を取り揃えます。
5. 修理作業の実施:
- 適切な手順と注意を払いながら、故障した部品の交換や修理作業を実施します。製造元のマニュアルやガイドラインに従い、作業を行います。
6. テストと調整:
- 修理作業が完了した後、ACサーボモーターをテストし、正常に動作するかどうかを確認します。必要に応じて調整を行い、動作を安定させます。
7. 予防的なメンテナンス:
- ACサーボモーターの故障を防ぐために、定期的なメンテナンスや点検を行うことが重要です。故障の原因を特定し、再発を防ぐための対策を講じます。
ACサーボモーターの故障時には、確実な診断と適切な対応が重要です。製造元や専門家のアドバイスを受けながら、迅速かつ正確な修理を行うことが重要です。
Posted by maa2ya8 at
16:10
│Comments(0)
2025年04月22日
中空ステッピングモータの活用事例:回転ステージや配線の最適化に貢献
中空ステッピングモーターは、その特性から様々な産業分野で活用されており、回転ステージや配線の最適化に貢献する事例があります。以下に具体的な活用事例を示します:
1. 回転ステージ用途:
- 光学機器: 中空ステッピングモーターは、回転ステージとして光学機器やレーザー加工機器などの精密機器に使用されます。中空構造により、光学系の配線や光路がスムーズに通過し、配線の最適化や機器のコンパクト化が実現されます。
- 医療機器: 医療用の画像診断装置や手術支援機器などにおいて、中空ステッピングモーターは回転ステージとして使用され、医療機器の操作性や精度を向上させます。
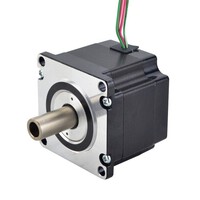
「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 0.78 Nm(110.5oz.in) 2.0A 57x57x45mm」
2. 配線の最適化:
- ロボットアーム: ロボットアームに搭載された中空ステッピングモーターは、配線の最適化に貢献します。中空構造により、回転部に配線を通すことが容易となり、ロボットアームの柔軟性や操作性が向上します。
- 航空宇宙産業: 航空宇宙産業においても、中空ステッピングモーターは配線の最適化に貢献します。航空機の操縦系統や航空機エンジンの可動部などに使用され、配線の整備性や信頼性を高めます。

「写真の由来:Nema 11 中空シャフト ステッピングモーター バイポーラ 双轴 7.5Ncm (10.6oz.in) 1.0A 28x28x44mm」
3. その他の活用事例:
- 3Dプリンティング: 中空ステッピングモーターは、3Dプリンティングの回転ステージとして使用され、複雑な造形物の精密な製造を支援します。
- 自動化装置: 工場の自動化装置や組立ラインにおいて、中空ステッピングモーターは配線の最適化やコンパクトな設計を実現し、生産効率を向上させます。
中空ステッピングモーターの特性を活かした回転ステージや配線の最適化は、様々な産業分野で効果的に活用されており、精密な操作や装置のコンパクト化、配線の整備性向上などに貢献しています。
1. 回転ステージ用途:
- 光学機器: 中空ステッピングモーターは、回転ステージとして光学機器やレーザー加工機器などの精密機器に使用されます。中空構造により、光学系の配線や光路がスムーズに通過し、配線の最適化や機器のコンパクト化が実現されます。
- 医療機器: 医療用の画像診断装置や手術支援機器などにおいて、中空ステッピングモーターは回転ステージとして使用され、医療機器の操作性や精度を向上させます。

「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 0.78 Nm(110.5oz.in) 2.0A 57x57x45mm」
2. 配線の最適化:
- ロボットアーム: ロボットアームに搭載された中空ステッピングモーターは、配線の最適化に貢献します。中空構造により、回転部に配線を通すことが容易となり、ロボットアームの柔軟性や操作性が向上します。
- 航空宇宙産業: 航空宇宙産業においても、中空ステッピングモーターは配線の最適化に貢献します。航空機の操縦系統や航空機エンジンの可動部などに使用され、配線の整備性や信頼性を高めます。

「写真の由来:Nema 11 中空シャフト ステッピングモーター バイポーラ 双轴 7.5Ncm (10.6oz.in) 1.0A 28x28x44mm」
3. その他の活用事例:
- 3Dプリンティング: 中空ステッピングモーターは、3Dプリンティングの回転ステージとして使用され、複雑な造形物の精密な製造を支援します。
- 自動化装置: 工場の自動化装置や組立ラインにおいて、中空ステッピングモーターは配線の最適化やコンパクトな設計を実現し、生産効率を向上させます。
中空ステッピングモーターの特性を活かした回転ステージや配線の最適化は、様々な産業分野で効果的に活用されており、精密な操作や装置のコンパクト化、配線の整備性向上などに貢献しています。
Posted by maa2ya8 at
15:23
│Comments(0)
2025年04月15日
リニアステッピングモータの制御技術と応用事例
リニアステッピングモータは、回転運動ではなく直線運動を行うモーターであり、精密な位置制御が可能です。以下にリニアステッピングモータの制御技術と応用事例について説明します:
制御技術
1. マイクロステップ制御: リニアステッピングモータは通常、マイクロステップ制御を使用して位置精度を向上させます。この制御方式により、スムーズな動作や微細な位置調整が可能になります。
2. 位置フィードバック: 一部のリニアステッピングモータには、位置フィードバックデバイス(エンコーダーやホール効果センサーなど)が組み込まれており、正確な位置検出を行うことで、位置精度を高めることができます。

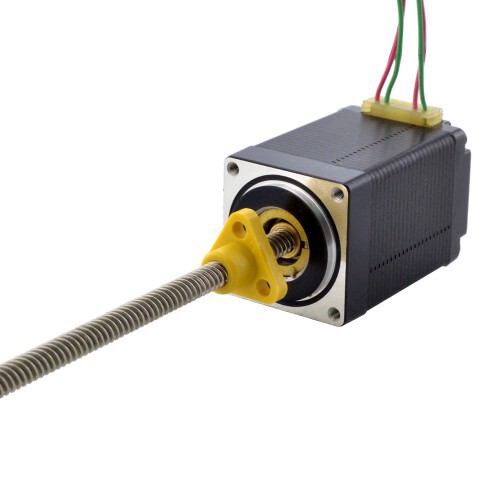
「写真の由来:Nema 17 エクスターナル 48mm リニアステッピングモータ 2.6A リード0.794mm 長さ250mm」
3. 速度制御: リニアステッピングモータの速度制御は、目標速度に達するための加速・減速制御が重要です。適切な速度制御を行うことで、安定した動作を実現します。
4. トルク制御: リニアステッピングモータのトルク制御は、負荷に応じた適切なトルクを提供することで、正確な位置制御を実現します。
応用事例
1. 3Dプリンター: リニアステッピングモータは、3Dプリンターの印刷ヘッドやプリンターベッドの位置制御に使用されます。高い位置精度を要求されるため、リニアステッピングモータが適しています。
2. 医療機器: 医療分野では、CTスキャナーやMRI検査機などの精密な位置制御にリニアステッピングモータが利用されています。患者の体を正確に移動させるために重要です。

「写真の由来:NEMA 11 エクスターナルリニアステッピングモータ 1.0A 11E18S1004HD5-150RS 0.12Nm ねじリード 5.08mm(0.2") 長さ 150mm」
3. 自動化装置: 自動化装置やロボットアームなどの産業用機器においても、リニアステッピングモータが使用されています。物品のピッキングや配置などの精密な操作に適しています。
4. 光学機器: レーザーカッターや顕微鏡などの光学機器において、リニアステッピングモータがレンズの位置調整や焦点調整などに使用されています。
リニアステッピングモータは、その高い位置制御能力と応用の多様性から、様々な産業分野で重要な役割を果たしています。
制御技術
1. マイクロステップ制御: リニアステッピングモータは通常、マイクロステップ制御を使用して位置精度を向上させます。この制御方式により、スムーズな動作や微細な位置調整が可能になります。
2. 位置フィードバック: 一部のリニアステッピングモータには、位置フィードバックデバイス(エンコーダーやホール効果センサーなど)が組み込まれており、正確な位置検出を行うことで、位置精度を高めることができます。

「写真の由来:Nema 17 エクスターナル 48mm リニアステッピングモータ 2.6A リード0.794mm 長さ250mm」
3. 速度制御: リニアステッピングモータの速度制御は、目標速度に達するための加速・減速制御が重要です。適切な速度制御を行うことで、安定した動作を実現します。
4. トルク制御: リニアステッピングモータのトルク制御は、負荷に応じた適切なトルクを提供することで、正確な位置制御を実現します。
応用事例
1. 3Dプリンター: リニアステッピングモータは、3Dプリンターの印刷ヘッドやプリンターベッドの位置制御に使用されます。高い位置精度を要求されるため、リニアステッピングモータが適しています。
2. 医療機器: 医療分野では、CTスキャナーやMRI検査機などの精密な位置制御にリニアステッピングモータが利用されています。患者の体を正確に移動させるために重要です。
「写真の由来:NEMA 11 エクスターナルリニアステッピングモータ 1.0A 11E18S1004HD5-150RS 0.12Nm ねじリード 5.08mm(0.2") 長さ 150mm」
3. 自動化装置: 自動化装置やロボットアームなどの産業用機器においても、リニアステッピングモータが使用されています。物品のピッキングや配置などの精密な操作に適しています。
4. 光学機器: レーザーカッターや顕微鏡などの光学機器において、リニアステッピングモータがレンズの位置調整や焦点調整などに使用されています。
リニアステッピングモータは、その高い位置制御能力と応用の多様性から、様々な産業分野で重要な役割を果たしています。
Posted by maa2ya8 at
15:24
│Comments(0)
2025年04月09日
モータドライバ選定時のチェックポイントまとめ
モータドライバを選定する際の重要なチェックポイントをまとめます:
1. モータの仕様に合致:
- モータドライバを選ぶ際には、対応するモータの仕様に合致しているか確認します。モータの電圧、電流、ステップ角、トルクなどに対応しているかを確認します。
2. ドライバの出力能力:
- モータドライバの出力能力は、モータに必要な電流や電圧を供給するために重要です。十分な出力能力を持つドライバを選ぶことが重要です。

「写真の由来:Leadshine デジタルステッピングドライバ 3DM580S 20-74VDC 0.5-8.0A (3相 Nema 17、23、24、34ステップモーターに適合)」
3. ステップ分解能:
- モータドライバのステップ分解能は、モータが移動する最小単位を決定します。アプリケーションの精度要件に合致する適切なステップ分解能を選択します。
4. 保護機能:
- 過電圧、過電流、過熱などの保護機能が重要です。モータやドライバを保護するために、適切な保護機能を備えたドライバを選定します。
5. 通信インターフェース:
- モータドライバが制御システムとの通信を行うためのインターフェースも重要です。適切な通信プロトコルやインターフェースを備えたドライバを選択します。

「写真の由来:Nema 17, 23, 24 ステッピングモータ用デジタルステッピングドライバ 1.0-4.2A 20-50VDC」
6. モーション制御機能:
- モーションプロファイルや速度制御、加速度制御などのモーション制御機能が必要な場合、それらの機能を備えたドライバを選択します。
7. サイズと取り付け方法:
- ドライバのサイズや取り付け方法も重要です。システム内に適切に収まるサイズであり、取り付けや配線が容易なものを選択します。
8. 価格と信頼性:
- 適切な性能を持ちつつ、予算内であることや信頼性が高いことも重要です。安定した動作と長寿命を持つ信頼性の高いドライバを選ぶことが重要です。
これらのチェックポイントを考慮して、適切なモータドライバを選定することで、効率的で安定したモータ制御を実現することができます。
1. モータの仕様に合致:
- モータドライバを選ぶ際には、対応するモータの仕様に合致しているか確認します。モータの電圧、電流、ステップ角、トルクなどに対応しているかを確認します。
2. ドライバの出力能力:
- モータドライバの出力能力は、モータに必要な電流や電圧を供給するために重要です。十分な出力能力を持つドライバを選ぶことが重要です。

「写真の由来:Leadshine デジタルステッピングドライバ 3DM580S 20-74VDC 0.5-8.0A (3相 Nema 17、23、24、34ステップモーターに適合)」
3. ステップ分解能:
- モータドライバのステップ分解能は、モータが移動する最小単位を決定します。アプリケーションの精度要件に合致する適切なステップ分解能を選択します。
4. 保護機能:
- 過電圧、過電流、過熱などの保護機能が重要です。モータやドライバを保護するために、適切な保護機能を備えたドライバを選定します。
5. 通信インターフェース:
- モータドライバが制御システムとの通信を行うためのインターフェースも重要です。適切な通信プロトコルやインターフェースを備えたドライバを選択します。

「写真の由来:Nema 17, 23, 24 ステッピングモータ用デジタルステッピングドライバ 1.0-4.2A 20-50VDC」
6. モーション制御機能:
- モーションプロファイルや速度制御、加速度制御などのモーション制御機能が必要な場合、それらの機能を備えたドライバを選択します。
7. サイズと取り付け方法:
- ドライバのサイズや取り付け方法も重要です。システム内に適切に収まるサイズであり、取り付けや配線が容易なものを選択します。
8. 価格と信頼性:
- 適切な性能を持ちつつ、予算内であることや信頼性が高いことも重要です。安定した動作と長寿命を持つ信頼性の高いドライバを選ぶことが重要です。
これらのチェックポイントを考慮して、適切なモータドライバを選定することで、効率的で安定したモータ制御を実現することができます。
Posted by maa2ya8 at
15:30
│Comments(0)
2025年03月31日
ステッピングモーターの選び方:ポイントと注意点
ステッピングモーターを選ぶ際には、いくつかの重要なポイントと注意点があります。以下に、ステッピングモーターを選ぶ際のポイントと注意点を示します:
ポイントと注意点:
1. トルク要件:
- アプリケーションで必要とされるトルクレベルを正確に評価し、適切なトルク特性を持つステッピングモーターを選択します。過大または過小なトルクのモーターを選択すると、性能や効率に影響を及ぼす可能性があります。
2. ステップ角:
- 必要な解像度や精度に基づいて、適切なステップ角を持つステッピングモーターを選定します。一般的なステップ角は1.8度や0.9度ですが、より高精度を求める場合にはマイクロステップ機能を持つモーターを選択します。

「写真の由来:Nema 16 バイポーラステッピングモーター 1.8°18Ncm (25.5oz.in) 0.65A 4.55V 39x39x34mm 4 ワイヤー」
3. ドライバーとの互換性:
- ステッピングモーターとドライバーの互換性を確認し、適切な電流や電圧、ステップパルスなどの仕様に適合する組み合わせを選択します。適切なマッチングがないと、モーターの効率や動作の安定性に影響を及ぼす可能性があります。
4. 環境条件:
- 使用環境に適した耐久性や耐環境性を持つステッピングモーターを選択します。特定の温度範囲や湿度条件下での動作が必要な場合には、それに適したモーターを選定します。
5. コストと性能のバランス:
- コストと性能のバランスを考慮して適切なステッピングモーターを選択します。必要な性能を満たしつつ、予算内で最適なモーターを選定することが重要です。

「写真の由来:Nema 17 集積式クローズドループステッピングモーター 24-36VDC 0.60Nm(85oz.in) 1000CPRエンコーダ付 ESSシリーズ」
6. 冷却方法:
- 長時間の連続運転や高負荷操作が予想される場合は、適切な冷却方法を持つステッピングモーターを選択します。過熱を防ぐために、適切な冷却方法を確保することが重要です。
ステッピングモーターを選ぶ際には、上記のポイントや注意点を考慮して、特定のアプリケーションや要件に最適なモーターを選択することが重要です。それにより、効率的な動作や安定したパフォーマンスを実現することができます。
ポイントと注意点:
1. トルク要件:
- アプリケーションで必要とされるトルクレベルを正確に評価し、適切なトルク特性を持つステッピングモーターを選択します。過大または過小なトルクのモーターを選択すると、性能や効率に影響を及ぼす可能性があります。
2. ステップ角:
- 必要な解像度や精度に基づいて、適切なステップ角を持つステッピングモーターを選定します。一般的なステップ角は1.8度や0.9度ですが、より高精度を求める場合にはマイクロステップ機能を持つモーターを選択します。

「写真の由来:Nema 16 バイポーラステッピングモーター 1.8°18Ncm (25.5oz.in) 0.65A 4.55V 39x39x34mm 4 ワイヤー」
3. ドライバーとの互換性:
- ステッピングモーターとドライバーの互換性を確認し、適切な電流や電圧、ステップパルスなどの仕様に適合する組み合わせを選択します。適切なマッチングがないと、モーターの効率や動作の安定性に影響を及ぼす可能性があります。
4. 環境条件:
- 使用環境に適した耐久性や耐環境性を持つステッピングモーターを選択します。特定の温度範囲や湿度条件下での動作が必要な場合には、それに適したモーターを選定します。
5. コストと性能のバランス:
- コストと性能のバランスを考慮して適切なステッピングモーターを選択します。必要な性能を満たしつつ、予算内で最適なモーターを選定することが重要です。

「写真の由来:Nema 17 集積式クローズドループステッピングモーター 24-36VDC 0.60Nm(85oz.in) 1000CPRエンコーダ付 ESSシリーズ」
6. 冷却方法:
- 長時間の連続運転や高負荷操作が予想される場合は、適切な冷却方法を持つステッピングモーターを選択します。過熱を防ぐために、適切な冷却方法を確保することが重要です。
ステッピングモーターを選ぶ際には、上記のポイントや注意点を考慮して、特定のアプリケーションや要件に最適なモーターを選択することが重要です。それにより、効率的な動作や安定したパフォーマンスを実現することができます。
Posted by maa2ya8 at
12:48
│Comments(0)
2025年03月24日
スイッチング電源が活躍する産業機器の例
スイッチング電源は、効率的な電力変換を実現するために広く使用される電源装置です。産業機器においても、スイッチング電源が活躍する場面が多くあります。以下に、産業機器においてスイッチング電源が活用される例をいくつか挙げてみます:
1. コンピュータやサーバー:
- コンピュータやサーバーなどの情報技術機器では、安定した電力供給が必要です。スイッチング電源は効率的な電力変換を可能にし、コンピュータシステムの動作に安定性をもたらします。

「写真の由来:250W 36V 7.0A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
2. 通信機器:
- 通信機器やネットワーク機器においても、スイッチング電源が広く利用されています。ルーター、スイッチ、通信基地局などの機器で使用され、効率的な電力変換を実現します。
3. 医療機器:
- 医療機器においても、スイッチング電源が重要な役割を果たしています。MRI機器、超音波装置、検査機器など多くの医療機器がスイッチング電源を使用しており、信頼性と効率性を提供しています。

「写真の由来:500W 36V 14A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
4. 産業用ロボット:
- 自動生産ラインや産業用ロボットにおいても、スイッチング電源が活躍しています。モータ駆動や制御システムなどに使用され、高効率かつ安定した電力供給を実現します。
5. 計測機器:
- 高精度な計測機器や制御装置では、安定した電力供給が不可欠です。スイッチング電源は、ノイズを抑制し、信号の安定性を確保するために使用されます。
これらは一部の産業機器でスイッチング電源が活躍する例です。スイッチング電源は効率性や信頼性が高く、さまざまな産業分野で広く利用されています。
1. コンピュータやサーバー:
- コンピュータやサーバーなどの情報技術機器では、安定した電力供給が必要です。スイッチング電源は効率的な電力変換を可能にし、コンピュータシステムの動作に安定性をもたらします。

「写真の由来:250W 36V 7.0A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
2. 通信機器:
- 通信機器やネットワーク機器においても、スイッチング電源が広く利用されています。ルーター、スイッチ、通信基地局などの機器で使用され、効率的な電力変換を実現します。
3. 医療機器:
- 医療機器においても、スイッチング電源が重要な役割を果たしています。MRI機器、超音波装置、検査機器など多くの医療機器がスイッチング電源を使用しており、信頼性と効率性を提供しています。

「写真の由来:500W 36V 14A 115/230Vスイッチング電源ステッピング モーターCNCルータキット」
4. 産業用ロボット:
- 自動生産ラインや産業用ロボットにおいても、スイッチング電源が活躍しています。モータ駆動や制御システムなどに使用され、高効率かつ安定した電力供給を実現します。
5. 計測機器:
- 高精度な計測機器や制御装置では、安定した電力供給が不可欠です。スイッチング電源は、ノイズを抑制し、信号の安定性を確保するために使用されます。
これらは一部の産業機器でスイッチング電源が活躍する例です。スイッチング電源は効率性や信頼性が高く、さまざまな産業分野で広く利用されています。
Posted by maa2ya8 at
15:29
│Comments(0)
2025年03月18日
リニアステッピングモータの設計要素と選定基準
リニアステッピングモータは、ステッピングモーターの一種で、直線的な動きをするモーターです。リニアステッピングモータの設計要素と選定基準は以下のようになります:
リニアステッピングモータの設計要素:
1. コイル:
- リニアステッピングモータには複数のコイルが配置されており、これらのコイルに電流を供給することで動作します。コイルの設計はモーターの性能に影響を与えます。

「写真の由来:NEMA 11 ノンキャプティブリニアステッピングモータ 11N13S1004HD5-200RS 1.0A 0.06Nm ねじリード 5.08mm(0.2") 長さ 200mm」
2. ステータ:
- ステータはコイルが配置される固定部分であり、モーターの構造や動作に重要な役割を果たします。
3. ロータ:
- ロータはステータに対して移動する部分であり、直線運動を実現します。ロータの設計や材料も性能に影響を与えます。
4. ステップ角:
- リニアステッピングモータのステップ角は、1ステップあたりの移動量を表します。ステップ角が小さいほど細かな動きが可能となります。
5. 分解能:
- リニアステッピングモータの分解能は、1ステップあたりの最小移動量を示します。高い分解能を持つモーターは、精密な動きが可能となります。

「写真の由来:NEMA 11 エクスターナルリニアステッピングモータr 1.0A 11E13S1004HD5-150RS 0.05Nm ねじリード 5.08mm(0.2") 長さ 150mm」
リニアステッピングモータの選定基準:
1. 必要な動作特性:
- 必要な移動速度、精度、および負荷に応じて適切なリニアステッピングモータを選定します。
2. コスト:
- プロジェクトの予算に合わせて、コスト効率の良いモーターを選定します。
3. 耐久性:
- 長期間の使用に耐える耐久性が重要です。信頼性の高い製品を選ぶことが重要です。
4. 制御システムとの互換性:
- 使用する制御システムとの互換性を考慮し、適切なインターフェースを持つモーターを選定します。
5. 環境条件:
- 運用する環境条件(温度、湿度など)に適したモーターを選定します。
6. メンテナンス要件:
- メンテナンスが容易で部品の入手性が高いモーターを選定することで、運用コストを抑えることができます。
これらの設計要素と選定基準を考慮して、適切なリニアステッピングモータを選定することで、目的に応じた効率的な動作を実現することができます。
リニアステッピングモータの設計要素:
1. コイル:
- リニアステッピングモータには複数のコイルが配置されており、これらのコイルに電流を供給することで動作します。コイルの設計はモーターの性能に影響を与えます。

「写真の由来:NEMA 11 ノンキャプティブリニアステッピングモータ 11N13S1004HD5-200RS 1.0A 0.06Nm ねじリード 5.08mm(0.2") 長さ 200mm」
2. ステータ:
- ステータはコイルが配置される固定部分であり、モーターの構造や動作に重要な役割を果たします。
3. ロータ:
- ロータはステータに対して移動する部分であり、直線運動を実現します。ロータの設計や材料も性能に影響を与えます。
4. ステップ角:
- リニアステッピングモータのステップ角は、1ステップあたりの移動量を表します。ステップ角が小さいほど細かな動きが可能となります。
5. 分解能:
- リニアステッピングモータの分解能は、1ステップあたりの最小移動量を示します。高い分解能を持つモーターは、精密な動きが可能となります。

「写真の由来:NEMA 11 エクスターナルリニアステッピングモータr 1.0A 11E13S1004HD5-150RS 0.05Nm ねじリード 5.08mm(0.2") 長さ 150mm」
リニアステッピングモータの選定基準:
1. 必要な動作特性:
- 必要な移動速度、精度、および負荷に応じて適切なリニアステッピングモータを選定します。
2. コスト:
- プロジェクトの予算に合わせて、コスト効率の良いモーターを選定します。
3. 耐久性:
- 長期間の使用に耐える耐久性が重要です。信頼性の高い製品を選ぶことが重要です。
4. 制御システムとの互換性:
- 使用する制御システムとの互換性を考慮し、適切なインターフェースを持つモーターを選定します。
5. 環境条件:
- 運用する環境条件(温度、湿度など)に適したモーターを選定します。
6. メンテナンス要件:
- メンテナンスが容易で部品の入手性が高いモーターを選定することで、運用コストを抑えることができます。
これらの設計要素と選定基準を考慮して、適切なリニアステッピングモータを選定することで、目的に応じた効率的な動作を実現することができます。
Posted by maa2ya8 at
15:31
│Comments(0)